
Par rapport au cours, dans le TP, les étapes 3 et 4 ne sont pas réalisées l'une après l'autre mais vous commencerez par réaliser un programme simple sans faire appel au parallélisme pour en voir les limites. Puis dans un second temps, nous réaliserons deux programmes séparés comme montré dans les étapes 3 et 4 afin d'illustrer l'intérêt du parallélisme.
Vous travaillerez en binômes sur deux PC voisins, en vous loguant sur le même compte sur chacun des postes afin de pouvoir partager aisément les fichiers. Vous utiliserez les mêmes PC au cours des différentes séances. Un PC jouera le rôle d'hôte pour les serveurs TCP et le second PC servira aux clients. Vous relèverez l'adresse IP de l'interface sur le VLAN rouge (IP commençant en 172.16.8…) du PC utilisé en tant que serveur.
Vous serez évalués en binôme et la note dépendra de votre participation au TP, du travail validé en séance et du projet rendu à la fin des TP sous forme d'une archive ZIP de votre dossier de projet.
Lien vers le cours d'intégration robotique BUT3 AII: https://bvdp.inetdoc.net/files/iut/staubliiut/cours_integration_ROBOTIQUE_BVDP_complet_2025.pdf
Lien vers le cours de robotique BUT2 AII: https://bvdp.inetdoc.net/files/iut/staubliiut/cours_ROBOTIQUE_BVDP_2023.pdf
documentation langage VAL3: https://bvdp.inetdoc.net/files/iut/staubliiut/robot_srs_et_controleur/Manuel%20de%20ref%20VAL3.PDF
lien vers le sujet de SAE robotique 2: saerobotique
Schémas électrique du CS9: https://bvdp.inetdoc.net/files/iut/staubliiut/doc/D28093901K.PDF
dont documentation connecteurs ethernet: https://bvdp.inetdoc.net/files/iut/staubliiut/doc/D28093901K.PDF#page=44
dont documentation connecteurs Fast I/Os: https://bvdp.inetdoc.net/files/iut/staubliiut/doc/D28093901K.PDF#page=49
doc détaillée du CS9: https://bvdp.inetdoc.net/files/iut/staubliiut/doc/D28094001G.PDF
Multitâche et séquencement: https://bvdp.inetdoc.net/files/iut/staubliiut/doc/Real%20Time%20Val3-Fieldbus%20Synchronization%20TSS00001404A.pdf
doc modbus: https://bvdp.inetdoc.net/files/iut/staubliiut/doc/Modbus%20Configuration%20CS8C-CS9_TSS00001604A.pdf
doc sur les sockets: https://bvdp.inetdoc.net/files/iut/staubliiut/doc/Socket%20TCP-IP_TSS000000904A.pdf
Récupérer et dezipper sur P:\2024-2025\s5aii\s5aii“X”\“nom_prenom”\robotiqueintegration\ : https://bvdp.inetdoc.net/files/iut/staubliiut/modbus/EasyModbusClient%20%28.NET%20Version%29.zip et https://bvdp.inetdoc.net/files/iut/staubliiut/modbus/EasyModbus%20Server%20Simulator%20%28.NET%20Version%29.zip
Récupérer et installer sur P:\2024-2025\s5aii\s5aii“X”\“nom_prenom”\robotiqueintegration\ : https://bvdp.inetdoc.net/files/iut/staubliiut/modbus/wireshark-portable-3-5-0.exe
Récupérer et dezipper AVEC 7ZIP P:\2024-2025\s5aii\s5aii“X”\“nom_prenom”\robotiqueintegration\ : https://bvdp.inetdoc.net/files/iut/staubliiut/modbus/tcp_server_windows.zip et https://bvdp.inetdoc.net/files/iut/staubliiut/modbus/tcp_server_simulator_windows.zip
Télécharger et décompresser le fichier suivant afin que le dossier CELL_IUT0 soit dans le dossier P:\2024-2025\s5aii\s5aii“X”\“nom_prenom”\robotiqueintegration\staubli : https://bvdp.inetdoc.net/files/iut/staubli/projets_SRS/Cellule_depart_staubli_vide.zip
Récupérer le modèle STL de la pince Schunk et du préhenseur de cylindre FESTO: https://bvdp.inetdoc.net/files/iut/staubli/stl/adaptateur_pince_festo_iut2023_open.stl
Récupérer le modèle STL de la station de tri FESTO: https://bvdp.inetdoc.net/files/iut/staubli/stl/station_tri_simple.stl
Récupérer le modèle STL de cylindre: https://bvdp.inetdoc.net/files/iut/staubli/stl/cylindre_festo_LR.stl
Lancer EasyModbusClient sur un PC, EasyModbusServer sur le PC voisin et Wireshark sur l'un des deux postes au choix (En ignorant les éventuelles mises à jour proposées).
Vous devrez relever individuellement sur papier les trames modbus (le contenu du segment TCP sans l'encapsulation des couches plus basses) et les rendre à l'enseignant pour validation, pensez donc à remplir la feuille pendant que vous faites les captures.
Nous allons générer des codes fonctions 4 et 6 afin de lire et d'écrire vers la case mémoire 1 de l'unit ID 1 différentes valeurs d'octets (que nous appellerons V). Vous devrez relever les différents octets échangés entre les deux applications dans les segments TCP modbus et faire apparaitre chacun des champs dans les requêtes et réponses. Vérifier que le champ de donnée varie bien en fonction de V. Pour cela:
Grâce à l'affichage dans l'application Client, Wireshark peut sembler inutile pour l'échange entre les EasyModbus mais sera très utile lorsque l'on codera en VAL3 le client Modbus pour vérifier si les paquets sont corrects. De plus Wireshark permet d'afficher les paquets TCP de Synchronisation (SYNC) et d’acquittement (ACK).
Fermer l'application EasyModbusServer et lancer tcp_server.exe dans le dossier tcp_server_windows.
Refaire Connect dans EasyModbusClient et vérifier l'échange des données entre EasyModbusClient et tcp_server.

Vous allez maintenant pouvoir remplacer EasyModbusClient par votre propre application VAL3.
Contrairement au projet de la SAE du BUT2, nous allons dans un premier temps ne pas configurer la CAO de la cellule et nous concentrer sur la communication et la commande simple de la station de tri FESTO.
Le contrôleur du robot est configuré dans le projet fourni, il faut maintenant créer une nouvelle application, pour cela:
Dans la fenêtre cellule→Controller1→Integration…→
Copier coller le code suivant:
begin
//attend que le robot arrive à la position souhaitée si demandé
if x_bBool==true
waitEndMove()
endIf
//assure l'affichage du message
while logMsg(x_sString)==false
delay(0)
endWhile
end
DANS L'ORDRE:
Créer une Donnée de type sio appelée siSocketTCP de taille 1 pour gérer les échanges via socket TCP. Double cliquer sur la variable siSocketTCP[0] puis dans la fenêtre Données sur Socket\siSocketTCP pour faire apparaitre la fenêtre d'association IO/variable. Faire en sorte que Données VAL3 : siSocketTCP[0] soit associée à Lien physique Socket\siSocketTCP
Créer une Donnée de type num appelée nTID de taille 1 pour le comptage des transaction modbus.
Créer une Donnée de type tool appelée tTool de taille 1 et initialisée avec tout les champs à 0 sauf Gripper à régler à FastIO\fOut1 et OTime et CTime à régler à 0.5secondes.
Créer des Données de type bool appelées b_e_present, b_e_metal, b_e_non_noir, b_e_plein, b_s_moteur, b_s_switch1, b_s_switch2, b_s_stoppeur_retracte et b_HAL_socket
Le programme d'initialisation est fourni. Dans l'onglet Cellule, clic droit sur Integration.. puis nouveau programme. Saisir HALinit, et copier coller ce code:
begin
if b_HAL_socket
//MODBUS via connecteur J205 avec les sockets
sioLink(siSocketTCP, siSocketTCP)
clearBuffer(siSocketTCP)
if(sioCtrl(siSocketTCP, "target",x_sIPServerModbus)!=0)
call logMsgBlock("probleme: sioCtrl(siSocketTCP, target, "+x_sIPServerModbus+")",true)
else
call logMsgBlock("ok: sioCtrl(siSocketTCP, target, "+x_sIPServerModbus+")",true)
endIf
//"endOfString" num (Pour ligne série, client et serveur TCP) Code ASCII pour le caractère de fin de chaîne à utiliser avec les opérateurs '=' (dans la plage [0, 255])
if(sioCtrl(siSocketTCP, "endOfString", 13)!=0)
call logMsgBlock("probleme sioCtrl(siSocketTCP, endOfString, 13)",true)
endIf
if(sioCtrl(siSocketTCP, "port", 502)!=0)
call logMsgBlock("probleme sioCtrl(siSocketTCP, port, 502)",true)
endIf
//0 pour configurer les lectures sur socket bloquantes,
//une autre valeur en seconde sinon
if(sioCtrl(siSocketTCP, "timeout",1)!=0 )
call logMsgBlock("probleme sioCtrl(siSocketTCP, timeout,1)",true)
endIf
// initialisation du compteur de transactions
nTID=0
else
//accès via connecteur dédié J207
endIf
end
Dans le programme start.pgx, mettre la variable b_HAL_socket à true puis appeler le programme HALInit en lui passant en paramètre une chaine de caractères correspondant à l'adresse IP de l'hôte sur lequel est exécuté le serveur modbus TCP.
Créer un programme HALlireEntrees sans paramètres. Créer 3 variables locales:
Votre programme HALlireEntrees doit dans l'ordre:
Vous pourrez, pour debugger, afficher la valeur de l_nValEntrees en faisant:
call logMsgBlock("l_nValEntrees:"+toString(".3",l_nValEntrees),false)
Tester votre programme en ajoutant dans start.pgx une boucle sans fin qui appelle chaque seconde HALlireEntrees et affiche dans la fenêtre de log la valeur des différentes variables en vous inspirant de:
if b_e_present
call logMsgBlock("b_e_present",false)
endIf
....
Jouer sur les boutons d'entrée de l'application tcp_serveur et vérifier l'affichage dans SRS. Au besoin, utiliser Wireshark pour debugguer la communication entre votre programme et tcp_server.
Créer un programme HALecrireSorties sans paramètres. Créer 3 variables locales:
Votre programme HALecrireSorties doit dans l'ordre:
modifier start.pgx pour faire en sorte que les entrées lues par HALlireEntrees soient aiguillées chacune vers une sortie différente en vous inspirant de:
if b_e_present
call logMsgBlock("b_e_present",false)
endIf
//bit 0 d'entrée envoyé sur le bit 2 de sortie
b_s_switch2=b_e_present
...
Jouer sur les boutons d'entrée de l'application tcp_serveur et vérifier l'affichage dans SRS ainsi que la commande des sorties dans tcp_server. Au besoin, utiliser Wireshark pour debugguer la communication entre votre programme et tcp_server.
Nous allons maintenant écrire une application simple qui va séquentiellement permettre au robot de saisir une pièce, la déposer sur le tapis qui l'amène jusqu'à glissière 2 puis la récupérer pour la déposer à nouveau sur la position de saisie. L'application ici ne fait pas usage du parallélisme des tâches de commande du robot et de la station FESTO, ce qui se traduit par le fait que le robot attend sans bouger pendant que la station de tri achemine la pièce.
Définir et initialiser les variables suivantes dans l'onglet Données (pour pouvoir faire “aller à” dans la vue 3D)
jBrasBaisseSaisie={0,0,50,0,75,0}
jBrasBaisseTapis={-90,0,50,0,75,0}
pSaisie={{436.94,154.76,7.70,0,180,0},{ssame,esame,wsame}}
//position de flange dans world pour saisie dépose de pièces
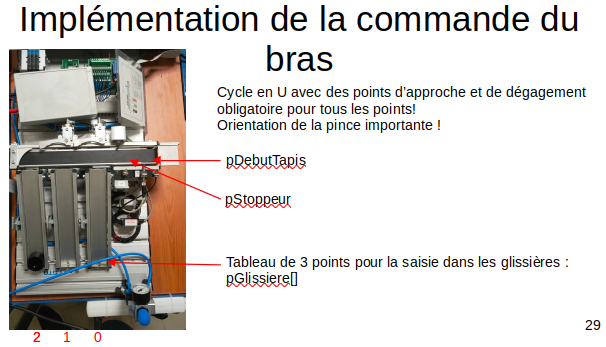
pStoppeur={{-145.43,-256.05,126.88,180,0,-90},{ssame,esame,wsame}}
pDebutTapis={{-145.43,-192.73,126.88,180,0,-90},{ssame,esame,wsame}}
pGlissiere[0]={{141.49,-324.43,24.81,0,-159.22,87.36},{ssame,esame,wsame}}
pGlissiere[1]={{141.49,-400.95,24.81,0,-159.22,87.36},{ssame,esame,wsame}}
pGlissiere[2]={{141.49,-479.76,24.81,0,-159.22,87.36},{ssame,esame,wsame}}
//position de flange dans world pour dépose de pièces dans la boite (même zone que Tapis)
pVide={{339.081697,-392.926577,85.875444,-0.440943,-179.996914,51.413801},{ssame,esame,wsame}}
Il faut maintenant configurer l'outil du robot, pour cela: - Choisir l'onglet Géométrie dans la fenêtre de droite - Cliquer sur la flèche à gauche du nom de la cellule pour faire apparaitre "Controller1 [s9...]" puis faire de même pour votre Projet - Cliquer droit sur "Flange" (qui signifie Bride en français, soit l'emplacement où fixer l'outil) puis cliquer gauche sur "Nouvelle donnée" - Saisir un nom pour l'outil, ou laisser le nom par défaut (tTool) puis cliquer sur Ok - Vérifier que tTool apparait maintenant en cliquant sur la flèche à coté de "flange[0]"
Récupérer le modèle: https://bvdp.inetdoc.net/files/iut/staubli/stl/cellule_simplifiee.wrl
Éditer la position absolue suivante:
63.3 -68.2 550.45 0 0 -90
Récupérer le modèle STL de la pince Schunk et du préhenseur de bouchon: https://bvdp.inetdoc.net/files/iut/staubli/stl/adaptateur_pince_festo_iut2023_open.stl
Le modèle téléchargé est déjà référencé correctement pour faciliter le positionnement du Handler (point saisisseur) et du Handle (base: point de saisie). La bride du robot (Flange) est un Handler en Val3, et nous allons connecter ce Handler au Handle de l'outil pince. Il est important de respecter scrupuleusement les étapes suivantes sinon l'outil ne sera pas correctement ajouté au robot!
L'image suivante montre le repère du handler du robot c'est à dire sa bride (Flange en anglais):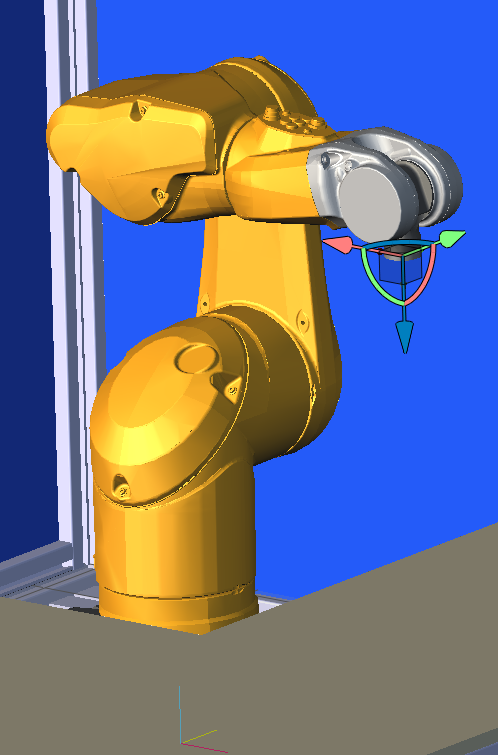
Pour ajouter la pince au robot:
Ensuite il faut associer l'outil à la variable tTool, pour cela:
Ensuite, cliquer droit sur le handler de l'outil puis définir comme TCP (Tool Center Point= Centre De l'Outil) pour pouvoir déplacer l'outil.
Pour ajouter un objet dans l'espace de travail du robot:
Insérer dans l'espace de travail du robot:
Vous devez positionner les éléments pour obtenir une configuration proche de celle du robot réel (vous adapterez les positions plus tard en relevant avec le pendant la configuration cartésienne du robot lorsqu'il est en position de saisie et de dépose du bouchon). Vous devez obtenir un espace de travail tel que celui visible sur la figure suivante:
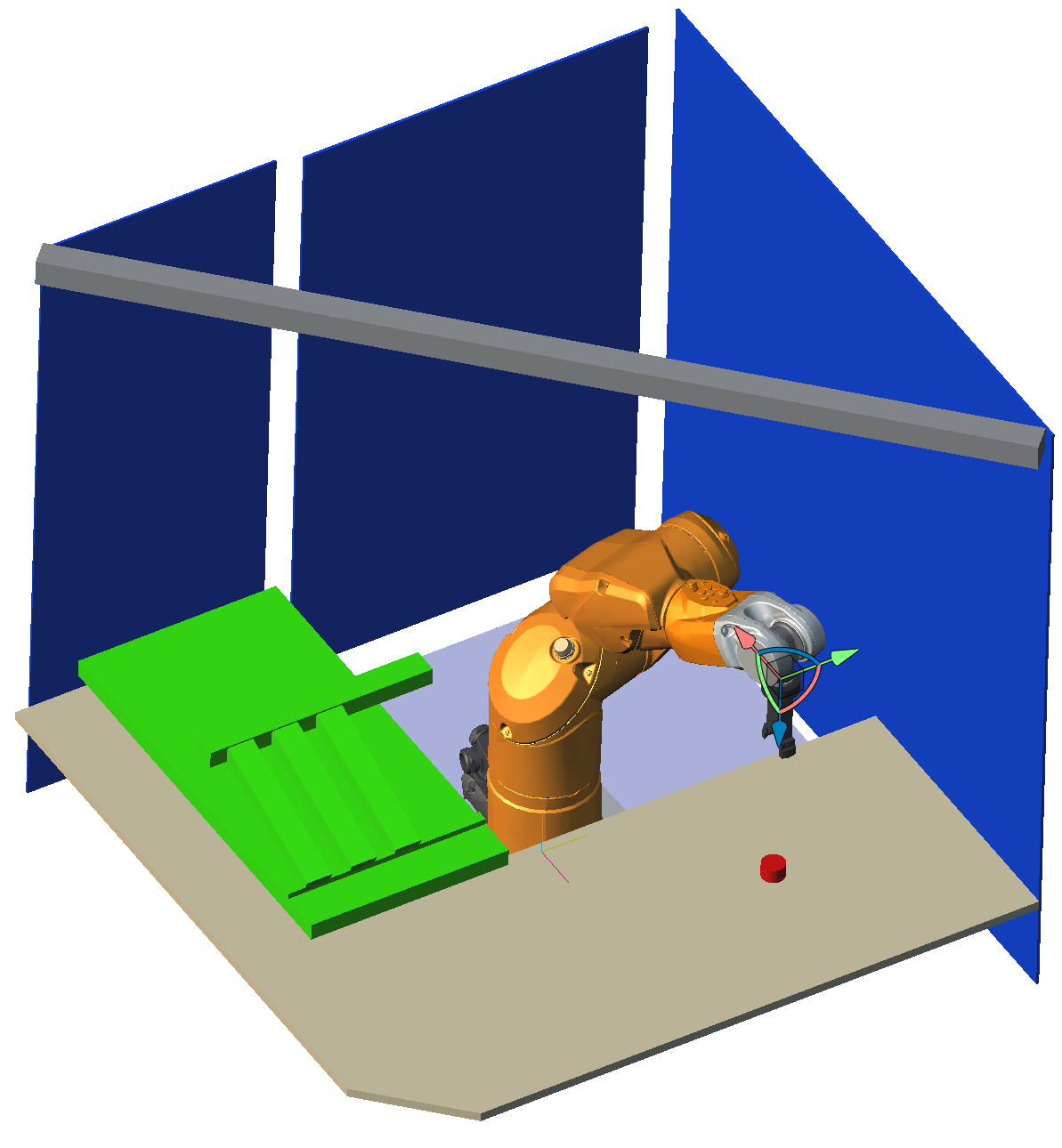
Ensuite vous devrez positionner finement le modèle CAO de la station FESTO en exploitant les différents points visibles sur la figure suivante, en sélectionnant chacun des points dans l'onglet Données et en faisant “Aller à” afin que la pince se trouve en face du point correspondant:
Dans le données, sélectionner la variable tTool de type tool, et double cliquer pour l'éditer. Vérifiez que vous avez bien comme changement de repère {0,0,0,0,0,0}, et que le gripper est bien réglé à FastIO\fOut1 . Saisir 1 pour les 2 champs suivants qui permettent de régler les durées de délais en seconde(s) pour que la pince s'ouvre et se ferme après que la commande lui soit envoyée.
Dans le programme start, ajouter après les initialisations (en respectant les consignes données en cours concernant les mouvements à faire en articulaire et en cartésien):
dans une boucle sans fin
b_s_moteur=true
b_s_stoppeur_retracte=true
le robot va chercher la pièce en pSaisie et la dépose en pDebutTapis
dans une boucle tant que b_e_plein est faux
b_s_switch1=b_e_non_noir
b_s_switch2=b_e_metal
dans une boucle tant que b_e_plein est vrai
attendre
le robot va chercher la pièce dans la glissière 2 (dans pGlissiere[2]) et la dépose en pSaisie
Tester le programme en simulation dans SRS, d'abord à l'aide de tcp_server puis à l'aide de tcp_server_simulator.
Créer 2 programmes en utilisant le code déjà fait aux exercices précédents:
Modifier votre programme précédent pour qu'il utilise les deux nouveaux programmes ainsi que du code supplémentaire pour gérer les changements de zone. La seule différence de fonctionnement est que le robot dépose maintenant la pièce en pVide dans la zone de la station de tri plutôt qu'en pSaisie de la zone de saisie.
Créer un nouveau programme appelé mae et coder la machine à états vue en TD (en gérant le comptage des pièces dans les trois glissières à l'aide d'une variable globale de type num à 3 cases nCptGlissiere[3]).
L'incrémentation ou la lecture d'une case du tableau de compteur doit se faire en “protégeant” la donnée partagée. Pour cela:
Dans le programme start, faire uniquement l’initialisation du bras (mouvement de connexion vers jBrasBaisseSaisie), de la pince (ouvrir), et de la HAL puis appeler avec l'instruction call le programme mae pour le tester en simulation, d'abord avec l'application tcp_server puis avec tcp_server_simulator. Conserver tout le code que vous avez fait à l'exercice précédent après le call, il ne sera pas utilisé dans cet exercice mais dans les suivants.
Remplacer l'appel du programme mae par la programmation d'une tâche synchrone en faisant:
//programmation de la tache périodique
//mae est un programme créé, et exécuté à une périodicité de 0.012s
taskCreateSync "mae",.012,bOverRun,mae()
call logMsgBlock("Tache periodique mae lancee",true)
//blocage du programme appelant
while(true)
delay(0.008)
endWhile
Tester et comprendre ce que fait le programme start.
Mélanger les programmes déjà réalisés pour que le robot:
Ajouter une tache périodique de période 1seconde pour afficher le nombre de pièces dans chacune des glissières sur le pendant:
begin
while true
setMutex(b_verrouCptGlissiere)
l_n_cpt_glissiere_affichage[2]=nCptGlissiere[2]
l_n_cpt_glissiere_affichage[1]=nCptGlissiere[1]
l_n_cpt_glissiere_affichage[0]=nCptGlissiere[0]
b_verrouCptGlissiere=false
call logMsgBlock("cptG: "+toString("1",l_n_cpt_glissiere_affichage[0])+ " "+toString("1",l_n_cpt_glissiere_affichage[1])+ " "+toString("1",l_n_cpt_glissiere_affichage[2]),false)
delay(1)
endWhile
end
Tester votre programme avec SRS en simulation avec tcp_server_simulator puis sur le robot réel en simulant la station de tri avec tcp_server_simulator puis finalement avec la vrai station de tri en utilisant l'adresse IP fournie pour accéder au serveur modbus de la maquette: 172.16.6.60

TODO: décrire utilisation de SYCON pour associer variables et case mémoire modbus
 Vous êtes arrivé au bout!
Vous êtes arrivé au bout!