Table des matières
Lien vers Moodle Jeremie: https://moodle.iut-tlse3.fr/course/view.php?id=5011 pour éditer, cliquer sur “activer le mode édition en haut à droite”, puis éditer la page “Dossier intégration (how to)Page” en cliquant à sa droite sur modifier→paramètres, puis contenu.
2023/01/26
Bertrand loggué avec le compte de jeremie dispose des droits d'admin renome C:\Program Files\Staubli\SRS 2019 en C:\Program Files\Staubli\SRS 2019_casse et copie D:\travail\bertrand\SRS 2019 fonctionnel u2 en C:\Program Files\Staubli\SRS 2019
il faudra réessayer d'uploader un projet non vérrolé sur le controleur avec
18/11/2022
problème pour ouverture projet rubikscube sur pc erau-p10 à coté du robot
dès l'ouverture du projet, les fichiers sont verrolés et le projet n'est plus ouvrable, même sur un poste sans problème
le même projet s'ouvre correctement sur pc en u2
zip du dossier c:\Program Files\Staubli\SRS2019 fonctionnel en u2 vers D:\travail\bertrand\SRS 2019 fonctionnel u2.zip zip du dossier c:\Program Files\Staubli\SRS2019 NON fonctionnel vers D:\travail\bertrand\SRS 2019 foireux.zip
et utilisation depuis D:\travail\bertrand\SRS 2019 fonctionnel u2 résoud le problème
Alain me dit qu'il a eu le même problème avant et que manu a réinstallé à la bourrin SRS…
comparaison des dossiers D:\travail\bertrand\SRS 2019 et C:\Program Files\Staubli\SRS 2019 avec kdiff3 portable ( https://netcologne.dl.sourceforge.net/project/myportableapps/KDiff3Portable/KDiff3Portable_0.9.98_Development_Test_3.paf.exe )
différences sur:
C:\Program Files\Staubli\SRS 2019\lib\SRS.RemoteMaintenance.Interfaces.dll C:\Program Files\Staubli\SRS 2019\lib\SRS.Resources.dll C:\Program Files\Staubli\SRS 2019\ngen.log C:\Program Files\Staubli\SRS 2019\staubli.install.srs.log
Log que j'ai eu initialement:
- logerreurouverture
Environment =========== --Versions-- OS Version: Microsoft Windows NT 6.2.9200.0 Windows Version: Windows 10 Education:[10.0.19044] - [6.3] - Client 64 Bit OS: True CLR Version: 4.0.30319.42000 SRS Version: SRS : 2019.10.1 Machine Name: P-GE2I-ERAU-P10 UserName: bertrand.vandeportae Processor Count: 4 CommandLine: "C:\Program Files\Staubli\SRS 2019\StaubliRoboticsSuite.exe" --Protection Support Information-- HASP API Version: 5.11.34634 HASP Runtime Version: 8.13.105211.1 HASP Runtime Package Version: 8.13 --Cells Support Information-- Current Cell Path: D:\travail\bertrand\Projet08-Demo_JPO\Demo_vissage_bvdp\CELL_IUT0\CELL_IUT0.cell - vendredi 11 février 2022 Controller1: s8.11Cs9_BS2229 --Installed Framework-- Framework v2.0.50727: 2.0.50727.4927 Framework v3.0: 3.0.30729.4926 Framework v3.5: 3.5.30729.4926 Framework v4\Client: 4.8.04084 Framework v4\Full: 4.8.04084 Framework v4.0\Client: 4.0.0.0 --Sycon.Net support information-- SyCon.Net version: 1.500.210413.36204 SyCon.Net path: C:\Program Files (x86)\Hilscher GmbH\SYCONnet\ Sycon.Net file version: 1.1200.5.2508 (1, 0, 0, 0) - mardi 19 juin 2018 Display Devices =========== --- Display adapters ... - Intel(R) UHD Graphics 630 - (Id:PCI\VEN_8086&DEV_3E91&SUBSYS_092F1028&REV_00) * AttachedToDesktop - [\Registry\Machine\System\CurrentControlSet\Control\Video\{0EB1B301-A852-11EB-AEDD-9ABB300F318E}\0000], \\.\DISPLAY1 * \\.\DISPLAY1\Monitor0 - Generic PnP Monitor * None - [\Registry\Machine\System\CurrentControlSet\Control\Video\{0EB1B301-A852-11EB-AEDD-9ABB300F318E}\0001], \\.\DISPLAY2 * None - [\Registry\Machine\System\CurrentControlSet\Control\Video\{0EB1B301-A852-11EB-AEDD-9ABB300F318E}\0002], \\.\DISPLAY3 - NVIDIA NVS 310 - (Id:PCI\VEN_10DE&DEV_107D&SUBSYS_094E10DE&REV_A1) * AttachedToDesktop, PrimaryDevice - [\Registry\Machine\System\CurrentControlSet\Control\Video\{64262A96-2B64-11EC-AF49-A4BB6DB6A151}\0000], \\.\DISPLAY4 * \\.\DISPLAY4\Monitor0 - Generic PnP Monitor * None - [\Registry\Machine\System\CurrentControlSet\Control\Video\{64262A96-2B64-11EC-AF49-A4BB6DB6A151}\0001], \\.\DISPLAY5 Assemblies ========== mscorlib, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089 StaubliRoboticsSuite, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null System, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089 System.Core, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089 DevExpress.Data.Desktop.v20.1, Version=20.1.6.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a DevExpress.Data.v20.1, Version=20.1.6.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a PresentationFramework, Version=4.0.0.0, Culture=neutral, PublicKeyToken=31bf3856ad364e35 WindowsBase, Version=4.0.0.0, Culture=neutral, PublicKeyToken=31bf3856ad364e35 PresentationCore, Version=4.0.0.0, Culture=neutral, PublicKeyToken=31bf3856ad364e35 System.Xaml, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089 Staubli.Robotics, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null System.Configuration, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b03f5f7f11d50a3a System.Xml, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089 System.Reactive, Version=4.2.0.0, Culture=neutral, PublicKeyToken=94bc3704cddfc263 ?, Version=0.0.0.0, Culture=neutral, PublicKeyToken=null ActiproSoftware.Ribbon.Wpf, Version=18.1.671.0, Culture=neutral, PublicKeyToken=36ff2196ab5654b9 ActiproSoftware.Shared.Wpf, Version=18.1.671.0, Culture=neutral, PublicKeyToken=36ff2196ab5654b9 DevExpress.Xpf.Grid.v20.1, Version=20.1.6.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a DevExpress.Xpf.Grid.v20.1.Core, Version=20.1.6.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a DevExpress.Xpf.Core.v20.1, Version=20.1.6.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a ActiproSoftware.Text.Wpf, Version=18.1.671.0, Culture=neutral, PublicKeyToken=36ff2196ab5654b9 ReactiveUI, Version=10.5.0.0, Culture=neutral, PublicKeyToken=null SRS.Interfaces, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null Splat, Version=9.1.0.0, Culture=neutral, PublicKeyToken=null System.Windows.Forms, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089 System.Drawing, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b03f5f7f11d50a3a System.ValueTuple, Version=4.0.3.0, Culture=neutral, PublicKeyToken=cc7b13ffcd2ddd51 ReactiveUI.WPF, Version=10.5.0.0, Culture=neutral, PublicKeyToken=null Splat.Drawing, Version=9.1.0.0, Culture=neutral, PublicKeyToken=null Anonymously Hosted DynamicMethods Assembly, Version=0.0.0.0, Culture=neutral, PublicKeyToken=null Mono.Options, Version=5.0.0.0, Culture=neutral, PublicKeyToken=null ?, Version=0.0.0.0, Culture=neutral, PublicKeyToken=null NGettext, Version=0.6.1.0, Culture=neutral, PublicKeyToken=08d3d1c89dfd2985 SRS.Resources, Version=1.0.0.0, Culture=neutral, PublicKeyToken=null PresentationFramework.Aero2, Version=4.0.0.0, Culture=neutral, PublicKeyToken=31bf3856ad364e35 UIAutomationTypes, Version=4.0.0.0, Culture=neutral, PublicKeyToken=31bf3856ad364e35 UIAutomationProvider, Version=4.0.0.0, Culture=neutral, PublicKeyToken=31bf3856ad364e35 ReflectionHelperTypesPublicWrappers, Version=0.0.0.0, Culture=neutral, PublicKeyToken=null DevExpress.Xpf.Themes.Office2016WhiteSE.v20.1, Version=20.1.6.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a ReflectionHelperTypes, Version=0.0.0.0, Culture=neutral, PublicKeyToken=6d662ee35c32032e DevExpress.Mvvm.v20.1, Version=20.1.6.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a PresentationFramework-SystemXml, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089 PresentationCore.resources, Version=4.0.0.0, Culture=fr, PublicKeyToken=31bf3856ad364e35 ActiproSoftware.Themes.Office.Wpf, Version=18.1.671.0, Culture=neutral, PublicKeyToken=36ff2196ab5654b9 System.Xml.Linq, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089 Microsoft.Practices.Prism.MefExtensions, Version=5.0.0.0, Culture=neutral, PublicKeyToken=31bf3856ad364e35 Microsoft.Practices.Prism.Composition, Version=5.0.0.0, Culture=neutral, PublicKeyToken=31bf3856ad364e35 System.ComponentModel.Composition, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089 log4net, Version=2.0.8.0, Culture=neutral, PublicKeyToken=669e0ddf0bb1aa2a mscorlib.resources, Version=4.0.0.0, Culture=fr, PublicKeyToken=b77a5c561934e089 System.resources, Version=4.0.0.0, Culture=fr, PublicKeyToken=b77a5c561934e089 Staubli.protection, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null ?, Version=0.0.0.0, Culture=neutral, PublicKeyToken=null SRS.ControllerSettings, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.Infrastructure, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SP, Version=8.5.7963.24431, Culture=neutral, PublicKeyToken=null SRS.VAL3Studio, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.Debugger, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.Debugger.Soap, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.Emulator, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.3DView, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.UserPage, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.RemoteMaintenance, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.PhysicalIO, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.EmulatorUpdates, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.MaintenanceTools, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.Safety, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.DataEditor, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.IoMapEditor, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.Recorder, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null Staubli.Robotics.IO.Applicom, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null Staubli.Robotics.IO.CoDeSys, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null Staubli.Robotics.IO.Hilscher, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null Staubli.Robotics.IO.StaubliIO, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null Staubli.Robotics.Io.Cs9, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null Microsoft.Practices.Prism.PubSubEvents, Version=1.0.0.0, Culture=neutral, PublicKeyToken=31bf3856ad364e35 Microsoft.Practices.ServiceLocation, Version=1.2.0.0, Culture=neutral, PublicKeyToken=31bf3856ad364e35 Staubli.Robotics.Windows, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null Microsoft.Practices.Prism.SharedInterfaces, Version=1.0.0.0, Culture=neutral, PublicKeyToken=31bf3856ad364e35 ReactiveUI.Events.WPF, Version=10.5.0.0, Culture=neutral, PublicKeyToken=null SRS.Infrastructure.Interfaces, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null ActiproSoftware.Grids.Wpf, Version=18.1.671.0, Culture=neutral, PublicKeyToken=36ff2196ab5654b9 ActiproSoftware.Editors.Interop.Grids.Wpf, Version=18.1.671.0, Culture=neutral, PublicKeyToken=36ff2196ab5654b9 ActiproSoftware.Docking.Wpf, Version=18.1.671.0, Culture=neutral, PublicKeyToken=36ff2196ab5654b9 System.Runtime.Serialization, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089 Microsoft.Practices.Prism.Mvvm, Version=1.0.0.0, Culture=neutral, PublicKeyToken=31bf3856ad364e35 System.Runtime, Version=4.1.2.0, Culture=neutral, PublicKeyToken=b03f5f7f11d50a3a netstandard, Version=2.0.0.0, Culture=neutral, PublicKeyToken=cc7b13ffcd2ddd51 System.Resources.ResourceManager, Version=4.0.1.0, Culture=neutral, PublicKeyToken=b03f5f7f11d50a3a System.ServiceModel, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089 DynamicData, Version=6.13.0.0, Culture=neutral, PublicKeyToken=null SRS.ControllerSettings.Interfaces, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null Telerik.Windows.Controls.Input, Version=2014.3.1202.45, Culture=neutral, PublicKeyToken=5803cfa389c90ce7 Telerik.Windows.Controls, Version=2014.3.1202.45, Culture=neutral, PublicKeyToken=5803cfa389c90ce7 DevExpress.Xpf.Controls.v20.1, Version=20.1.6.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a SRS.VAL3Studio.Interfaces, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null Microsoft.VisualBasic, Version=10.0.0.0, Culture=neutral, PublicKeyToken=b03f5f7f11d50a3a SRS.Emulator.Interfaces, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null Staubli.Licensing.Interface, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.PhysicalIO.Interfaces, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null DevExpress.Xpf.LayoutControl.v20.1, Version=20.1.6.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a ActiproSoftware.Wizard.Wpf, Version=18.1.671.0, Culture=neutral, PublicKeyToken=36ff2196ab5654b9 ActiproSoftware.SyntaxEditor.Wpf, Version=18.1.671.0, Culture=neutral, PublicKeyToken=36ff2196ab5654b9 Staubli.Robotics.Language, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null DevExpress.Printing.v20.1.Core, Version=20.1.6.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a DevExpress.Xpf.Accordion.v20.1, Version=20.1.6.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a Newtonsoft.Json, Version=12.0.0.0, Culture=neutral, PublicKeyToken=30ad4fe6b2a6aeed SRS.EmulatorUpdates.Interfaces, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.Debugger.Interfaces, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.UserPage.Interfaces, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null CefSharp, Version=79.1.360.0, Culture=neutral, PublicKeyToken=40c4b6fc221f4138 SRS.3DView.Interfaces, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null KiteNETFoundation, Version=0.0.0.0, Culture=neutral, PublicKeyToken=null DevExpress.Xpf.Docking.v20.1, Version=20.1.6.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a DevExpress.Xpf.Layout.v20.1.Core, Version=20.1.6.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a SRS.Recorder.Interface, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null SRS.Safety.Interfaces, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null srs.kinematic, Version=9.0.0.0, Culture=neutral, PublicKeyToken=null KiteNET, Version=3.1.7020.17063, Culture=neutral, PublicKeyToken=null System.ObjectModel, Version=4.0.11.0, Culture=neutral, PublicKeyToken=b03f5f7f11d50a3a ActiproSoftware.Text.LLParser.Wpf, Version=18.1.671.0, Culture=neutral, PublicKeyToken=36ff2196ab5654b9 ActiproSoftware.Editors.Wpf, Version=18.1.671.0, Culture=neutral, PublicKeyToken=36ff2196ab5654b9 SRS.RemoteMaintenance.Interfaces, Version=1.0.0.0, Culture=neutral, PublicKeyToken=null DevExpress.XtraEditors.v10.2, Version=10.2.5.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a DevExpress.Utils.v10.2, Version=10.2.5.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a DevExpress.Data.v10.2, Version=10.2.5.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a DevExpress.XtraTreeList.v10.2, Version=10.2.5.0, Culture=neutral, PublicKeyToken=b88d1754d700e49a SRS.IoMapEditor.Interfaces, Version=2019.10.1.0, Culture=neutral, PublicKeyToken=null System.ComponentModel.Composition.resources, Version=4.0.0.0, Culture=fr, PublicKeyToken=b77a5c561934e089 MetadataViewProxies_460fed6c-515b-4a45-9103-15fadd222ae1, Version=0.0.0.0, Culture=neutral, PublicKeyToken=null ?, Version=0.0.0.0, Culture=neutral, PublicKeyToken=null System.Linq.Expressions, Version=4.1.2.0, Culture=neutral, PublicKeyToken=b03f5f7f11d50a3a PresentationFramework-SystemXmlLinq, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089 PresentationFramework.resources, Version=4.0.0.0, Culture=fr, PublicKeyToken=31bf3856ad364e35 XpfCoreDynamicTypes, Version=0.0.0.0, Culture=neutral, PublicKeyToken=null Punchclock, Version=3.1.0.0, Culture=neutral, PublicKeyToken=null hasp_net_windows, Version=5.11.1.23192, Culture=neutral, PublicKeyToken=56120be447701319 Telerik.Windows.Controls.Navigation, Version=2014.3.1202.45, Culture=neutral, PublicKeyToken=5803cfa389c90ce7 WindowsFormsIntegration, Version=4.0.0.0, Culture=neutral, PublicKeyToken=31bf3856ad364e35 CefSharp.Wpf, Version=79.1.360.0, Culture=neutral, PublicKeyToken=40c4b6fc221f4138 CefSharp.Core, Version=79.1.360.0, Culture=neutral, PublicKeyToken=40c4b6fc221f4138 System.Data, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089 PresentationFramework-SystemData, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089 System.Numerics, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089 Telerik.Windows.Data, Version=2014.3.1202.45, Culture=neutral, PublicKeyToken=5803cfa389c90ce7 ActiproSoftware.DataGrid.Contrib.Wpf, Version=18.1.671.0, Culture=neutral, PublicKeyToken=36ff2196ab5654b9 System.ComponentModel.DataAnnotations, Version=4.0.0.0, Culture=neutral, PublicKeyToken=31bf3856ad364e35 Microsoft.GeneratedCode, Version=1.0.0.0, Culture=neutral, PublicKeyToken=null ICSharpCode.SharpZipLib, Version=1.2.0.246, Culture=neutral, PublicKeyToken=1b03e6acf1164f73 System.Reflection, Version=4.1.2.0, Culture=neutral, PublicKeyToken=b03f5f7f11d50a3a Akavache.Core, Version=6.5.0.0, Culture=neutral, PublicKeyToken=null Akavache, Version=6.5.0.0, Culture=neutral, PublicKeyToken=null SQLitePCLRaw.batteries_v2, Version=1.1.13.388, Culture=neutral, PublicKeyToken=8226ea5df37bcae9 SQLitePCLRaw.provider.e_sqlite3, Version=1.1.13.388, Culture=neutral, PublicKeyToken=9c301db686d0bd12 SQLitePCLRaw.core, Version=1.1.13.388, Culture=neutral, PublicKeyToken=1488e028ca7ab535 Akavache.Sqlite3, Version=6.5.0.0, Culture=neutral, PublicKeyToken=null Newtonsoft.Json.Bson, Version=1.0.0.0, Culture=neutral, PublicKeyToken=30ad4fe6b2a6aeed HtmlAgilityPack, Version=1.5.5.0, Culture=neutral, PublicKeyToken=bd319b19eaf3b43a System.Xaml.resources, Version=4.0.0.0, Culture=fr, PublicKeyToken=b77a5c561934e089 System.Windows.Controls.Ribbon, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b77a5c561934e089 System.Management, Version=4.0.0.0, Culture=neutral, PublicKeyToken=b03f5f7f11d50a3a Exception ========= System.Windows.Markup.XamlParseException: La valeur fournie sur 'System.Windows.Markup.StaticExtension' a levé une exception. ---> System.ArgumentException: La valeur StaticExtension 'SRS.Resources.Images.VAL3Application16' ne peut pas être résolue en énumération, champ statique ou propriété statique. à System.Windows.Markup.StaticExtension.ProvideValue(IServiceProvider serviceProvider) à MS.Internal.Xaml.Runtime.ClrObjectRuntime.CallProvideValue(MarkupExtension me, IServiceProvider serviceProvider) --- Fin de la trace de la pile d'exception interne --- à System.Windows.Markup.XamlReader.RewrapException(Exception e, IXamlLineInfo lineInfo, Uri baseUri) à System.Windows.Markup.WpfXamlLoader.Load(XamlReader xamlReader, IXamlObjectWriterFactory writerFactory, Boolean skipJournaledProperties, Object rootObject, XamlObjectWriterSettings settings, Uri baseUri) à System.Windows.ResourceDictionary.CreateObject(KeyRecord key) à System.Windows.ResourceDictionary.OnGettingValue(Object key, Object& value, Boolean& canCache) à System.Windows.ResourceDictionary.OnGettingValuePrivate(Object key, Object& value, Boolean& canCache) à System.Windows.ResourceDictionary.GetValueWithoutLock(Object key, Boolean& canCache) à System.Windows.ResourceDictionary.GetValue(Object key, Boolean& canCache) à System.Windows.ResourceDictionary.GetValueWithoutLock(Object key, Boolean& canCache) à System.Windows.ResourceDictionary.GetValue(Object key, Boolean& canCache) à System.Windows.FrameworkElement.FindResourceInTree(FrameworkElement feStart, FrameworkContentElement fceStart, DependencyProperty dp, Object resourceKey, Object unlinkedParent, Boolean allowDeferredResourceReference, Boolean mustReturnDeferredResourceReference, DependencyObject boundaryElement, InheritanceBehavior& inheritanceBehavior, Object& source) à System.Windows.FrameworkElement.FindResourceInternal(FrameworkElement fe, FrameworkContentElement fce, DependencyProperty dp, Object resourceKey, Object unlinkedParent, Boolean allowDeferredResourceReference, Boolean mustReturnDeferredResourceReference, DependencyObject boundaryElement, Boolean isImplicitStyleLookup, Object& source) à System.Windows.FrameworkElement.TryFindResource(Object resourceKey) à SRS.VAL3Studio.Views.GeometryStyleSelector.SelectStyle(Object item, DependencyObject container) à System.Windows.Controls.ItemsControl.ApplyItemContainerStyle(DependencyObject container, Object item) à System.Windows.Controls.ItemsControl.MS.Internal.Controls.IGeneratorHost.PrepareItemContainer(DependencyObject container, Object item) à Telerik.Windows.Controls.TreeView.TreeViewPanel.InsertContainer(Int32 childIndex, UIElement container, Boolean isRecycled) à Telerik.Windows.Controls.TreeView.TreeViewPanel.AddContainerFromGenerator(Int32 childIndex, UIElement child, Boolean newlyRealized) à Telerik.Windows.Controls.TreeView.TreeViewPanel.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à MS.Internal.Helper.MeasureElementWithSingleChild(UIElement element, Size constraint) à System.Windows.Controls.ItemsPresenter.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Grid.MeasureCell(Int32 cell, Boolean forceInfinityV) à System.Windows.Controls.Grid.MeasureCellsGroup(Int32 cellsHead, Size referenceSize, Boolean ignoreDesiredSizeU, Boolean forceInfinityV, Boolean& hasDesiredSizeUChanged) à System.Windows.Controls.Grid.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Control.MeasureOverride(Size constraint) à Telerik.Windows.Controls.RadTreeViewItem.MeasureOverride(Size availableSize) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à Telerik.Windows.Controls.TreeView.TreeViewPanel.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à MS.Internal.Helper.MeasureElementWithSingleChild(UIElement element, Size constraint) à System.Windows.Controls.ItemsPresenter.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Grid.MeasureCell(Int32 cell, Boolean forceInfinityV) à System.Windows.Controls.Grid.MeasureCellsGroup(Int32 cellsHead, Size referenceSize, Boolean ignoreDesiredSizeU, Boolean forceInfinityV, Boolean& hasDesiredSizeUChanged) à System.Windows.Controls.Grid.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Control.MeasureOverride(Size constraint) à Telerik.Windows.Controls.RadTreeViewItem.MeasureOverride(Size availableSize) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à Telerik.Windows.Controls.TreeView.TreeViewPanel.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à MS.Internal.Helper.MeasureElementWithSingleChild(UIElement element, Size constraint) à System.Windows.Controls.ItemsPresenter.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à MS.Internal.Helper.MeasureElementWithSingleChild(UIElement element, Size constraint) à System.Windows.Controls.ScrollContentPresenter.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Grid.MeasureCell(Int32 cell, Boolean forceInfinityV) à System.Windows.Controls.Grid.MeasureCellsGroup(Int32 cellsHead, Size referenceSize, Boolean ignoreDesiredSizeU, Boolean forceInfinityV, Boolean& hasDesiredSizeUChanged) à System.Windows.Controls.Grid.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.ScrollViewer.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Grid.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Border.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Grid.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Control.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.DockPanel.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à MS.Internal.Helper.MeasureElementWithSingleChild(UIElement element, Size constraint) à System.Windows.Controls.ContentPresenter.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Border.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Control.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à MS.Internal.Helper.MeasureElementWithSingleChild(UIElement element, Size constraint) à System.Windows.Controls.ContentPresenter.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Border.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Control.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à MS.Internal.Helper.MeasureElementWithSingleChild(UIElement element, Size constraint) à System.Windows.Controls.ContentPresenter.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Border.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Border.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Grid.MeasureCell(Int32 cell, Boolean forceInfinityV) à System.Windows.Controls.Grid.MeasureCellsGroup(Int32 cellsHead, Size referenceSize, Boolean ignoreDesiredSizeU, Boolean forceInfinityV, Boolean& hasDesiredSizeUChanged) à System.Windows.Controls.Grid.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Control.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Grid.MeasureCell(Int32 cell, Boolean forceInfinityV) à System.Windows.Controls.Grid.MeasureCellsGroup(Int32 cellsHead, Size referenceSize, Boolean ignoreDesiredSizeU, Boolean forceInfinityV, Boolean& hasDesiredSizeUChanged) à System.Windows.Controls.Grid.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Control.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à ActiproSoftware.Windows.Controls.Docking.Primitives.SplitContainerPanel.MeasureOverride(Size availableSize) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Control.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à ActiproSoftware.Windows.Controls.Docking.Primitives.SplitContainerPanel.EnsureChildSplitContainersLoaded(Size availableSize) à ActiproSoftware.Windows.Controls.Docking.Primitives.SplitContainerPanel.MeasureOverride(Size availableSize) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Control.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à ActiproSoftware.Windows.Controls.Docking.Primitives.SplitContainerPanel.EnsureChildSplitContainersLoaded(Size availableSize) à ActiproSoftware.Windows.Controls.Docking.Primitives.SplitContainerPanel.MeasureOverride(Size availableSize) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Control.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à ActiproSoftware.Windows.Controls.Docking.Primitives.SplitContainerPanel.EnsureChildSplitContainersLoaded(Size availableSize) à ActiproSoftware.Windows.Controls.Docking.Primitives.SplitContainerPanel.MeasureOverride(Size availableSize) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Control.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à ActiproSoftware.Windows.Controls.Docking.Primitives.SplitContainerPanel.EnsureChildSplitContainersLoaded(Size availableSize) à ActiproSoftware.Windows.Controls.Docking.Primitives.SplitContainerPanel.MeasureOverride(Size availableSize) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Control.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.Controls.Grid.MeasureOverride(Size constraint) à System.Windows.FrameworkElement.MeasureCore(Size availableSize) à System.Windows.UIElement.Measure(Size availableSize) à System.Windows.ContextLayoutManager.UpdateLayout() à System.Windows.ContextLayoutManager.UpdateLayoutCallback(Object arg) à System.Windows.Media.MediaContext.FireInvokeOnRenderCallbacks() à System.Windows.Media.MediaContext.RenderMessageHandlerCore(Object resizedCompositionTarget) à System.Windows.Media.MediaContext.RenderMessageHandler(Object resizedCompositionTarget) à System.Windows.Interop.HwndTarget.OnResize() à System.Windows.Interop.HwndTarget.HandleMessage(WindowMessage msg, IntPtr wparam, IntPtr lparam) à System.Windows.Interop.HwndSource.HwndTargetFilterMessage(IntPtr hwnd, Int32 msg, IntPtr wParam, IntPtr lParam, Boolean& handled) à MS.Win32.HwndWrapper.WndProc(IntPtr hwnd, Int32 msg, IntPtr wParam, IntPtr lParam, Boolean& handled) à MS.Win32.HwndSubclass.DispatcherCallbackOperation(Object o) à System.Windows.Threading.ExceptionWrapper.InternalRealCall(Delegate callback, Object args, Int32 numArgs) à System.Windows.Threading.ExceptionWrapper.TryCatchWhen(Object source, Delegate callback, Object args, Int32 numArgs, Delegate catchHandler)
15/12/2021 Bertrand teste avec succès le nouveau préhenseur bouchon. Les 2 prises 41, 42 a coté du robot sont repassées sur le réseau gomettes bleues??????? Bertrand relève les dimensions pour faire simu et planifier le positionnement des éléments pour manip vissage bouchon
13/12/2021 Bertrand et Philippe configure réseau gomettes bleues pour capteurs/serveurs à disposition pour le robot+réseau wifi GE2I_ROBOTICS + configuration de bauds dynamique tels qu'indiqués sur newstaubli
26/01/2021:
Bertrand et Fabrice regardent pour connecter la pince schunk au bras. Nous décidons d'utiliser les Fast IOs en facades.
Bertrand accède au CS9 avec son PC portable via ethernet et via wifi EVALBYOD, et peut récupérer la config du CS9 dans un projet SRS après avoir installé la version adéquate de l'émulateur.
Fabrice ramène une alim 24V débitant assez pour alimenter la pince. F & B testent la pince avec cette alim en connectant les commandes d'ouverture et de fermeture soit à 24/0V soit à 0/24V et la pince bouge.
27/01/2021: Bertrand essaie de démarrer le pc de bureau à coté du robot, mais c'est très lent, et même après s'être loggué, SRS ne se lance pas, en restant bloqué sur l'écran image d'accueil. Windows rapporte des problèmes d'accès réseau au profil utilisateur p-ge2i-pcuser:

Bertrand voit un mauvais contact dans le connecteur J100-IN qui remplace les capteurs de sécurité, et arrange en engageant mieux les fils au fond des contacts (le numéro des fils posant problème s'affiche sur le pendant).
Bertrand configure les Fast IO sur le pendant pour les piloter avec les boutons 1 et 2 mais ne voit pas de changement d'état avec le multimètre, il faut probablement câbler ces sorties avec une alim comme indiqué sur la doc→ OUI, doc trouvée… donc il faut que je fasse un montage avec 2 pull up et que je réessaie…
Bertrand constate que la pince peut venir taper la barre transversale au dessus du robot, ce qui est embêtant. Ce serait bien de pouvoir la surélever un peu pour pouvoir facilement commander le robot en articulaire depuis une position bras vertical vers la position de travail sans risquer de taper.
Bertrand arrive à charger depuis son pc un programme sur le contrôleur et à l’exécuter en manuel. Impossible de tester en automatique ou automatique déporté car je n'ai pas la clef du sélecteur de mode…
Bertrand configure sur le pendant le profil de démarrage comme étant “default” car il n'y en avait aucun
29/01/2021 Bertrand fabrique le circuit d'interface et le teste.
Bertrand installe Filezilla sur le PC pour pouvoir accéder via FTP au contrôleur du robot.
Bertrand constate que le projet de Cédric est très gourmand en ressources d'affichage 3D. Rapatriement du projet pour analyser et simplification des modèles 3D.
3/02/2021 Constatation de lenteur d'affichage dans SRS vue 3D lorsque l'on interagit avec le robot via la fenêtre 3D mais pas lorsqu'on le déplace via les curseurs de commande articulaires
Installation de l'émulateur de controleur CS7.10 (à chercher dans le menu CS8…)
Impossible d'afficher le robot RX60 car les modèles 3D ne sont pas installés → Les installer et déployer l'emulateur CS7.10 et le modèle 3D du robot sur toutes les machines, pour que les étudiants puissent récupérer les projets de l'AIP (sera possible dans les 2 sens quand l'AIP passera en SRS 2019)
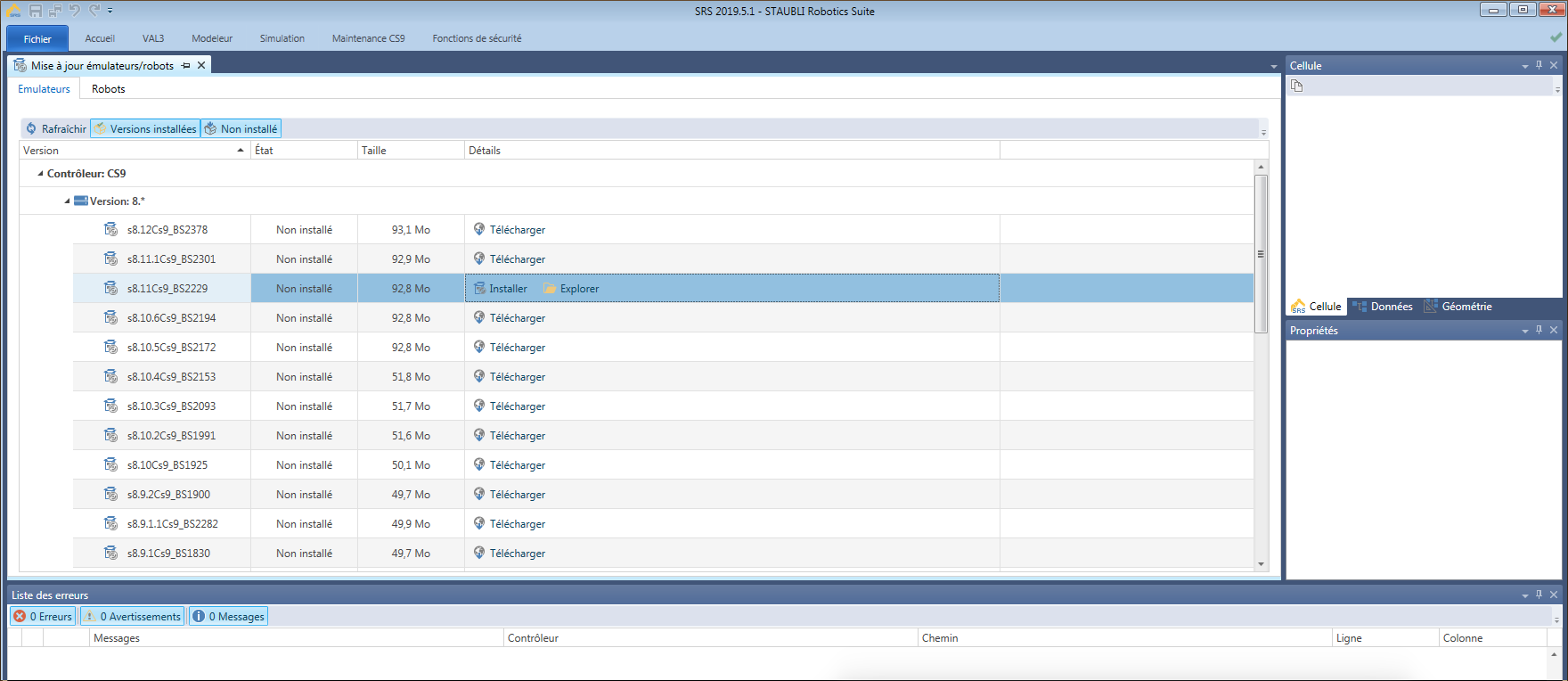
Emulateur à installer dans SRS 2019
version s8.11Cs9_BS2229
Fichier→Aide→Ouvrir l'outils de mise à jour en ligne (afficher les mises à jour Emulateur/robot)
et télécharger +installer
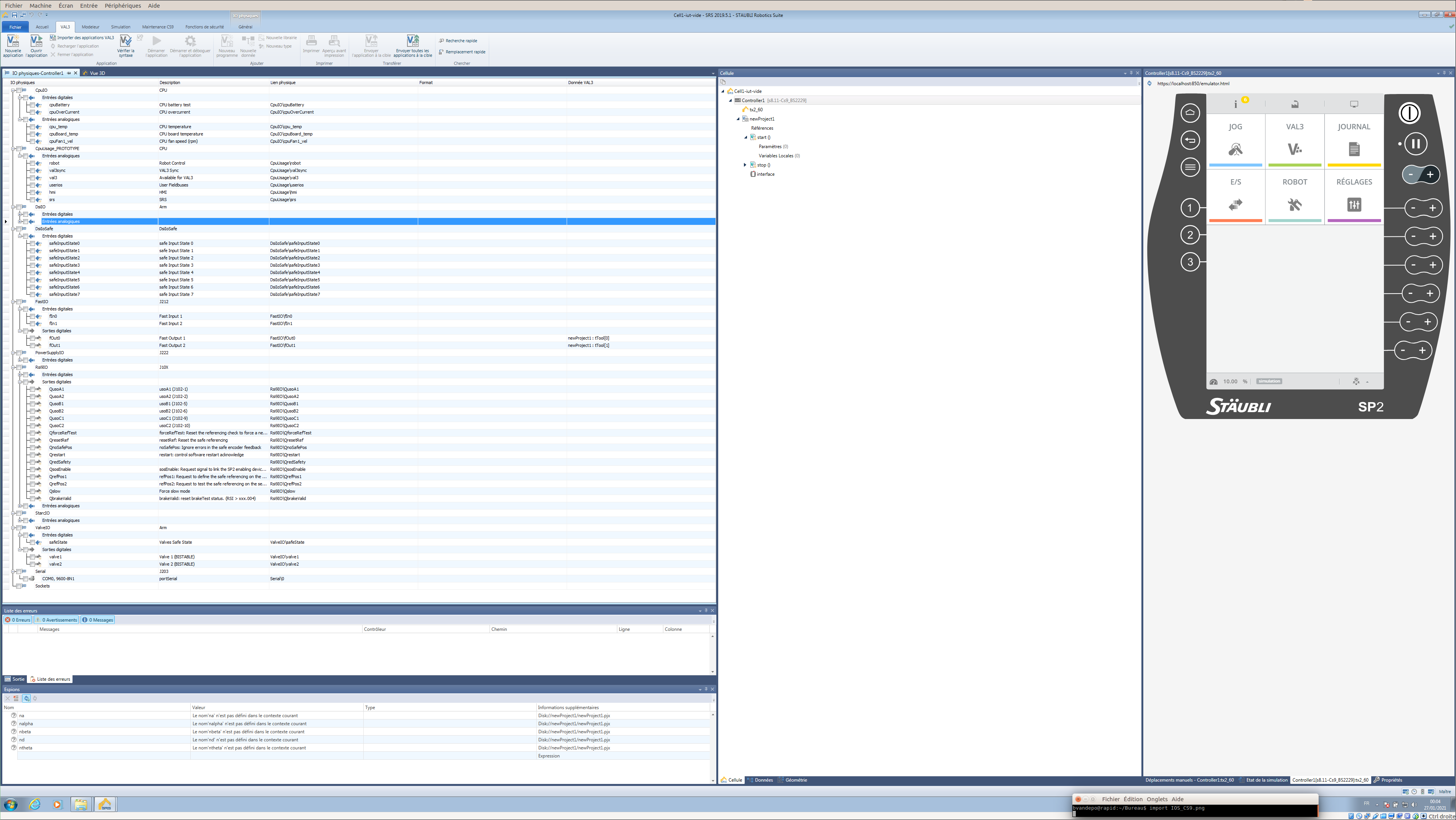
Récupération de la configuration du controleur vers un projet SRS
Fichier→Nouveau→Assistant nouvelle cellule→ depuis un controleur distant
IP du cs9: 172.16.8.250 utilisateur: default mdp: default
Infos sur les E/S en VAL3
GESTION DES E/S DANS UNE APPLICATION VAL 3: https://bvdp.inetdoc.net/files/iut/staubliiut/robot_srs_et_controleur/Manuel%20SRS.PDF#page=51
- essrs.txt
8.8 - GESTION DES E/S DANS UNE APPLICATION VAL 3 . 8.8.1 - IMPORTATION D'E/S PHYSIQUES M0003960.1 Pour voir les E/S PHYSIQUES disponibles sur un contrôleur, sélectionner un contrôleur dans l'arbre de cellule et cliquer sur la commande ACCUEIL\\E/S PHYSIQUES (SRS utilise les paramètres du contrô‐ leur courant pour afficher la liste des E/S disponibles. Pour ajouter ou supprimer des cartes, faire un clic droit sur le contrôleur et sélectionner le menu PROPRIÉTÉS). Il est possible d'importer des E/S physiques dans une application en utilisant le menu E/S du ruban contextuel IMPORTER. Celui-ci est utilisé pour déclarer automatiquement les variables de VAL 3 liées aux E/S PHYSIQUES sélectionnées. Pour cela soit : ■ Sélectionnez toutes les E/S que vous souhaitez importer. ■ Cliquer sur le bouton IMPORTER. ■ Sélectionner une option pour le nom des variables VAL 3. - Génération automatique avec les règles de nommage VAL 3 (option par défaut). - Utiliser l'ancien format de librairie (compatibilité avec les versions 6.x). Génère le même nom de variable VAL que ceux utilisés dans les versions 6.x ou antérieures (dans la librairie des E/S). Cette option peut être utilisée pour générer à nouveau une librairie d
CONFIGURATION DES ENTRÉES/SORTIES: https://bvdp.inetdoc.net/files/iut/staubliiut/robot_srs_et_controleur/Manuel%20SRS.PDF#page=17
A l'AIP, la commande pneumatique de la pince se fait avec une seule valve:
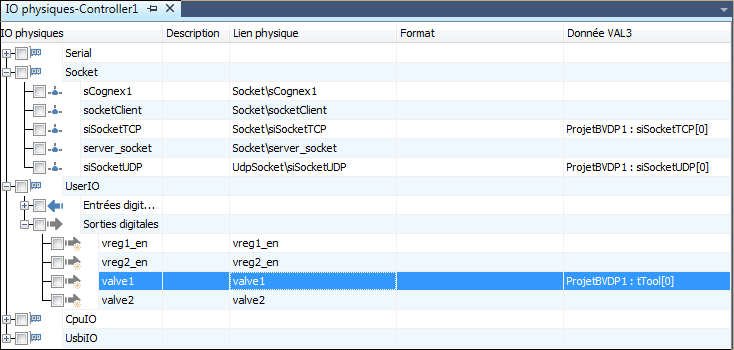
Création d'un projet vide avec configuration des E/S rapides pour la pince
Dans le projet de test Bertrand du 27/01/2021: https://bvdp.inetdoc.net/files/iut/staubliiut/projets_srs/Cell1-iut-vide-juste-2-sorties.zip dans IO Configuration FastIO→Sorties digitales→fOut0 est associée à donnée VAL3: “newProject1:tTool[0]”
avec le pendant: ES→cartes→fast IO→Sortie digitale→Fast Output 1 puis cliquer sur bouton 1, pareil pour 2

attention, numérotation débile 0→1 et 1→2
dans les données tTool[0], régler Gripper à FastIO\fOut0 dans les données tTool[1], régler Gripper à FastIO\fOut1
Configuration sur le pendant des E/S
Avec le pendant→menu→réglages→profil
default default
ou
maintenance spec_cal
puis cliquer sur s'identifier
Exécution en simulation
Mettre le pendant en mode manuel (en bas à droite), puis mettre sous puissance (bouton en haut à droite doit être entouré de violet), puis presser en continu sur le bouton “pause”
en mode automatique, il faut appuyer 1 fois sur le bouton pause pour faire apparaitre un point violet à coté et alors le robot peut bouger (faire un appel à enablePower() dans le programme Val3)
j'ai mis un pas de 100ms pour la simu et ça fonctionne presque en temps réel
Ajout d'ES au contrôleur
Coupleur EtherCAT dans les cartons: https://www.staubli.com/en/robotics/product-range/robot-controller/cs9-robot-controller/io/d244030/ The D 244 030 00 has eight digital inputs and four digital outputs. équivalent à: https://www.beckhoff.com/fr-fr/products/i-o/ethercat-terminals/ek1xxx-bk1xx0-ethercat-coupler/ek1818.html
doc sur les Terminaux Ethercat: https://www.staubli.com/fr-fr/robotics/gamme-produits/controleurs-robots/controleur-robot-cs9/io/
Documentation pour cablage pince
https://bvdp.inetdoc.net/files/iut/staubliiut/robot_srs_et_controleur/
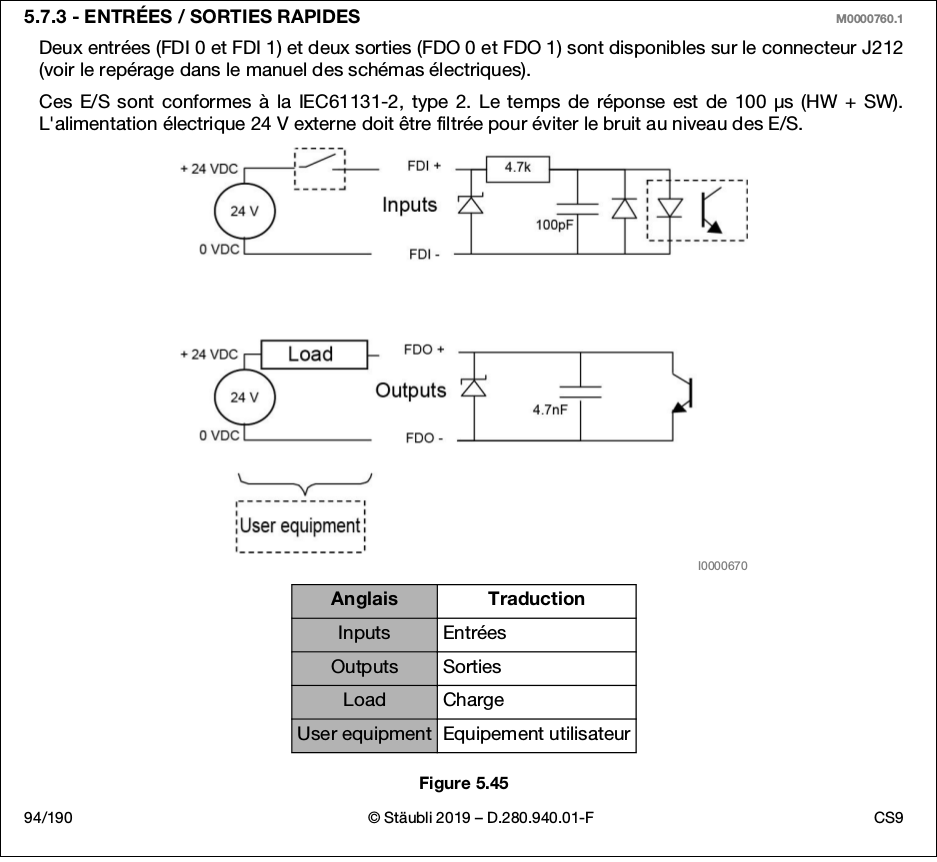
E/S Standard: https://bvdp.inetdoc.net/files/iut/staubliiut/robot_srs_et_controleur/Contr%C3%B4leur%20CS9%20manuel.PDF#page=94
Connecteurs sous la base du bras: https://bvdp.inetdoc.net/files/iut/staubliiut/robot_srs_et_controleur/TX260%20Manuel.PDF#page=14
Connecteurs sous l'avant bras: https://bvdp.inetdoc.net/files/iut/staubliiut/robot_srs_et_controleur/TX260%20Manuel.PDF#page=15
Connecteur avant bras: https://bvdp.inetdoc.net/files/iut/staubliiut/robot_srs_et_controleur/TX260%20Manuel.PDF#page=15
- J1203 Prise pour connexion électrique d'un éventuel outil utilisateur
- J1218 Prise pour connexion Ethernet cat. 5e ou électrique du préhenseur → il s'agit d'un connecteur M12 à 4 broches, seulement 2 paires différentielles cablées: https://fr.rs-online.com/web/p/cordon-industriels/2017196/?cm_mmc=FR-PLA-DS3A-_-google-_-PLA_FR_FR_C%C3%A2bles_%26_cordons_et_fils_Whoop-_-(FR:Whoop!)+Cordon+industriels-_-2017196&matchtype=&pla-299024250187&gclid=Cj0KCQiAmL-ABhDFARIsAKywVadqdpPb5CClXIQ2ZLt6EVF24H0kBQdALMWDt2i6LWUEBLJoKkfglzYaAo-oEALw_wcB&gclsrc=aw.ds
schéma electrique: https://bvdp.inetdoc.net/files/iut/staubliiut/robot_srs_et_controleur/TX260%20Manuel.PDF#page=58
config outils et choix de la sortie: https://bvdp.inetdoc.net/files/iut/staubliiut/robot_srs_et_controleur/guide-de-la-robotique-staubli-robotics-2020.pdf#page=219
Cablage de la pince
C'est la version EGP 40 (simple, non IO-Link)
Le shéma du connecteur de pince schunk vu de face sur le connecteur de la pince, les couleurs des cables sont respectées. (testé au multimètre par B.) : https://bvdp.inetdoc.net/files/iut/staubliiut/pince_schunk/IM0010510.PDF#page=30
Remarque Bertrand: Le connecteur se fixant sur la pince est droit et long, il serait mieux d'avoir un coudé pour limiter les risques d'arrachement, il s'agit d'un connecteur: Connection cable 4-pin, M8 socket, le cable existe en version 5m “angled” d'après https://bvdp.inetdoc.net/files/iut/staubliiut/pince_schunk/IM0010510.PDF#page=7
Si je fais un circuit de commande au plus près de la pince alors il faut prévoir de le connecter à la pince ET à l'avant bras. Il faudra veiller à éviter le plus possible le débordement des fils.
La pince consomme jusqu'à 2A crête sur l'alim 24V, mais est prévue pour une alim 1A: https://bvdp.inetdoc.net/files/iut/staubliiut/pince_schunk/IM0010510.PDF#page=18
Power consumption per digital inputs amounts to max. I=10 mA et c'est des signaux 24V. Il faut des delais de 15ms mini entre des ordres antagonistes: https://bvdp.inetdoc.net/files/iut/staubliiut/pince_schunk/IM0010510.PDF#page=38
Réglage de la force de serrage et voyants: https://bvdp.inetdoc.net/files/iut/staubliiut/pince_schunk/IM0010510.PDF#page=24
En cas d'erreur, pour “Acknowledge error”: https://bvdp.inetdoc.net/files/iut/staubliiut/pince_schunk/IM0010510.PDF#page=25
- Wait until the product has cooled down.
- Actuate both digital inlets, PIN 2 and PIN 4, with high.
ou:
- Disconnect voltage supply and reconnect.
Démarrage de la pince: https://bvdp.inetdoc.net/files/iut/staubliiut/pince_schunk/IM0010510.PDF#page=37
Troubleshooting: https://bvdp.inetdoc.net/files/iut/staubliiut/pince_schunk/IM0010510.PDF#page=40
- Faire un cable assez long pour faire 3 tours dans chaque sens de la pince (on pourra recouper si besoin de la pince vers le connecteur 1203 sur l'avant bras
- Le connecteur 1203 est connecté a 1202 en interne du robot comme le montre le schéma des connecteurs 1203 et 1202: https://bvdp.inetdoc.net/files/iut/staubliiut/robot_srs_et_controleur/Contr%C3%B4leur%20CS9%20elec.PDF#page=38
- Faire un cable du 1202 sur la base du robot vers le connecteur FAST IO JP212 en DB9 en facade du CS9 mais également vers une alim en 24V
détail du connecteur JP212 en facade du CS9: https://bvdp.inetdoc.net/files/iut/staubliiut/robot_srs_et_controleur/Contr%C3%B4leur%20CS9%20elec.PDF#page=45
en copie ici:
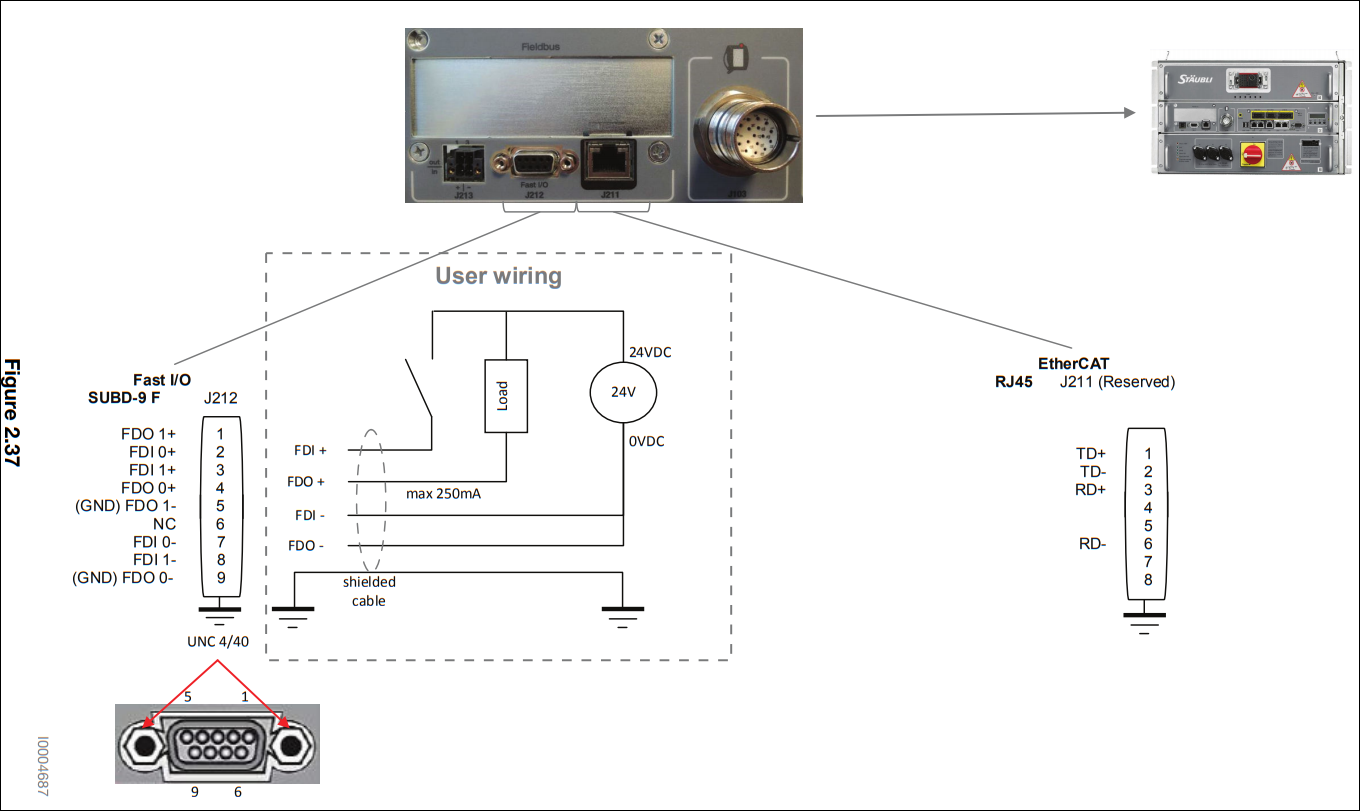
d'après ce schéma, les sorties FDO0+ et FDO1+ sont en collecteur ouvert… prévoir des résistances de pull up: 10KOhm doit dissiper 0.0576W en 24 volts
Oui le schéma de la doc du contrôleur confirme: https://bvdp.inetdoc.net/files/iut/staubliiut/robot_srs_et_controleur/Contr%C3%B4leur%20CS9%20manuel.PDF#page=94
Cablage des connecteurs du robot
Nous avons décidé que pour le connecteur J1202 visible sur: https://bvdp.inetdoc.net/files/iut/staubliiut/robot_srs_et_controleur/TX260%20Manuel.PDF#page=14
nous utiliserons aussi un câble ethernet entre le connecteur J1202 et un bornier. (conducteurs monobrins facile à souder et à fixer sur les borniers). Ainsi plus tard, si l'on souhaite passer d'autres signaux vers le connecteur de l'avant bras, on aura déjà 8 fils câblés sur le bornier à vis et il ne sera pas nécessaire de ressouder sur le connecteur.
Les connecteurs comportent 13 fils: https://bvdp.inetdoc.net/files/iut/staubliiut/robot_srs_et_controleur/Contr%C3%B4leur%20CS9%20elec.PDF#page=37
Idéalement les fils G, R et S entre J1202 et J1203 sont de plus grosse section pour passer les alims, et les autres sont des paires, donc câblons intelligemment pour le jour où l'on souhaiterai faire passer des signaux différentiels vers l'outils. Le câble Ethernet est constitué de 4 paires torsadés, il faut que tu utilises un fil de chacune des paires pour aller à 24V/0V/ouvre/ferme sur la pince, et que les autres fils des paires soient laissés en attente sur le bornier à vis
j'ai réfléchi au mieux pour faciliter le câblage et prévoir les évolutions futures et te demande donc le câblage suivant:
| Borne du connecteur J1202 | câble Ethernet | câblage entre J1203 et pince |
|---|---|---|
| G | marron plein | 24V → Marron |
| M | marron/blanc | rien |
| S | bleu plein | OV →Bleu |
| N | bleu/blanc | rien |
| J | vert plein | Open → Blanc |
| T | vert/blanc | rien |
| L | orange plein | Close →Noir |
| U | orange/blanc | rien |
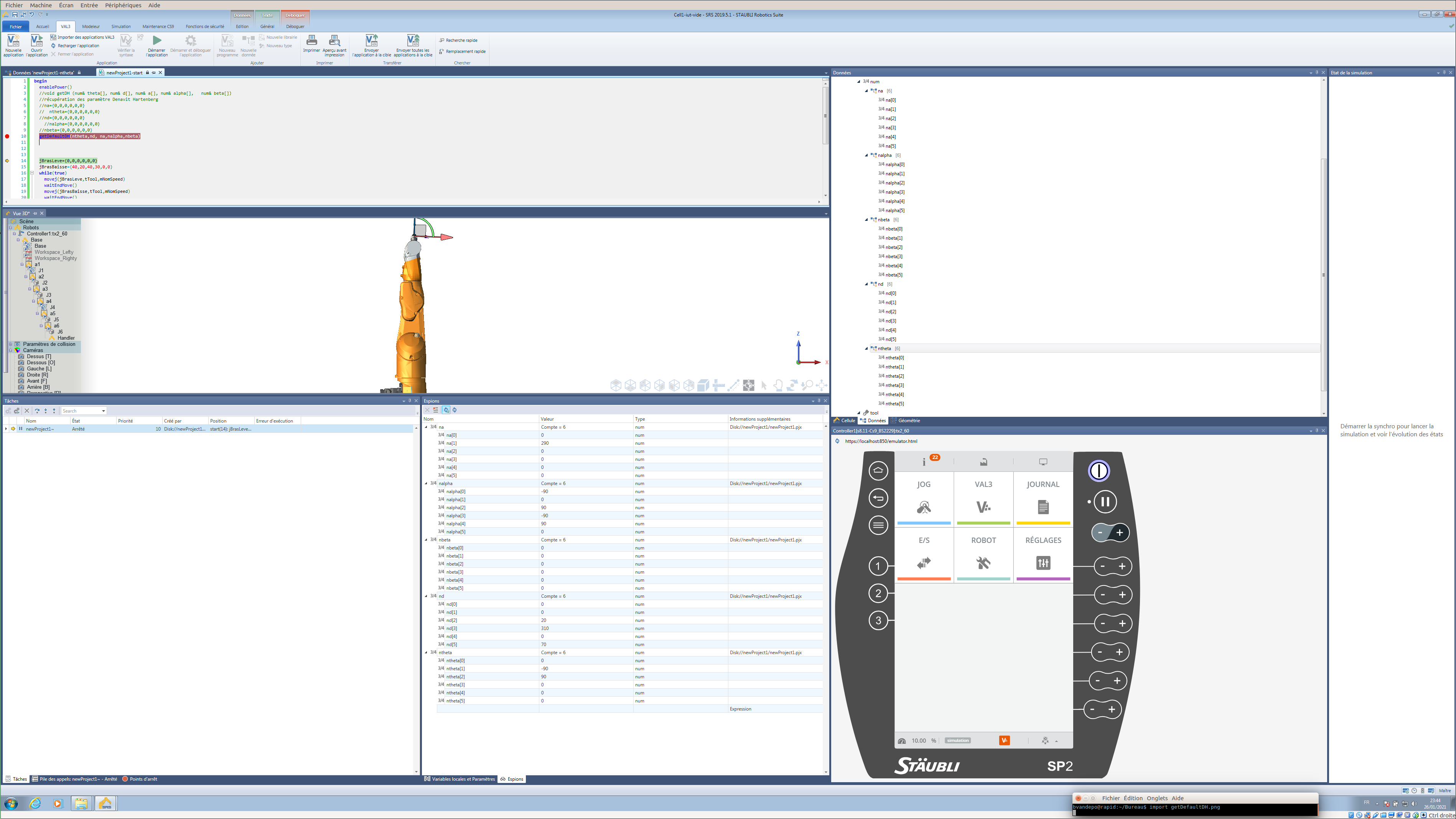
Projet pour récupérer les paramètres Denavit-Hartenberg
https://fr.wikipedia.org/wiki/Denavit-Hartenberg
Dans le projet de test Bertrand du 27/01/2021: https://bvdp.inetdoc.net/files/iut/staubliiut/projets_srs/Cell1-iut-vide-getDH.zip
j'obtiens les mêmes paramètres en simu avec getDH(…) et getDefaultDH(…):
Exécution d'un programme en mode manuel
Pour exécuter une application chargée depuis SRS:
- mettre l'interrupteur en mode manuel et sélectionner sur le pendant aussi
- Menu→ Val3
- bouton 3 ligne à gauche du pendant
- choisir avec les flèches: gestionnaire d'applications puis ok
- sélectionner l'application chargée
- presser le bouton run
- choisir le projet et F8 pour OK
- presser ensuite la poignée de l'homme mort + mise sous puissance ( dans les 15 secondes), le bouton pause doit clignoter en bleu, sinon il faut aller dans le menu jog du pendant, cliquer sur mode Arret à gauche de Joint (sinon la commande de déplacement via les boutons du pendant est prioritaire sur les mouvements du programme)
- presser le bouton pause en continu pour autoriser le programme à contrôler le robot
Exécution d'un programme en mode manuel
Programme simple avec commandes en articulaire puis en cartésien pour dessiner un carré en l'air:
https://bvdp.inetdoc.net/files/iut/staubliiut/projets_srs/Cell1-iut-vide-premier-programme-iut.zip
<html> <iframe width=“560” height=“315” src=“https://www.youtube.com/embed/hu6BDzA1J1E” frameborder=“0” allow=“accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture” allowfullscreen></iframe> </html>
Pilotage de la pince Schunk
Entrée de l'arduino pilotée par le controleur CS9
Les sorties rapides du CS9 se comportent comme des interrupteurs qui se ferment lorsque la sortie est active. Connecter:
- FDO1- (broche 5 du DB9) à GND arduino
- FDO1+ (broche 1 du DB9) à entrée arduino A0 avec Pull up de 10KOhm vers le 5V
Sorties en 24V pour piloter la pince Schunk avec l'arduino
Transistors KSC1815YTA: https://fr.farnell.com/on-semiconductor/ksc1815yta/transistor-bipol-npn-50v-to-226aa/dp/2453945?ost=245-3945
- il supporte

- 68KOhm sur la base
- Pull up de 12KOhm vers 24V sur le collecteur
- Emetteur à la masse
Dimensionnement
Quand le transistor est saturé  , le pull up au 24V doit laisser passer un courant suffisant, pour Rc=12KOhm,
, le pull up au 24V doit laisser passer un courant suffisant, pour Rc=12KOhm, 
Soit  (c'est le
(c'est le  de la datasheet, pour petit courant de collecteur)
de la datasheet, pour petit courant de collecteur)
Le courant mini pour saturer le transistor:

on prend de la marge:

0.7V de chute de tension entre émetteur et base,
 , on prend dans la série E12:
, on prend dans la série E12: 
Programme arduino du circuit d'interface
- commande_pince_schunk.ino
//B. Vandeportaele IUT GEII 29/01/2021 //commande_pince_schunk //Important: LA PINCE DOIT S'OUVRIR QUAND ON DEBRANCHE DU CONTROLEUR int ouverture = 2; int fermeture = 3; int commande = A0; /////////////////// #define OUVERT 0 #define FERME 1 char etat = OUVERT; /////////////////// void setup() { Serial.begin(9600); Serial.println("Démarrage interface pince Schunk/controleur Staubli CS9"); pinMode(ouverture, OUTPUT); pinMode(fermeture, OUTPUT); pinMode(commande, INPUT); rectify_error(); if (digitalRead(commande) == OUVERT) ouvre(); else ferme(); } /////////////////// //attention logique inversée car je pilote des transistors NPN void rectify_error() { //1-1 en 24V, 0-0 en 5V digitalWrite(ouverture, LOW); digitalWrite(fermeture, LOW); Serial.println("rectify_error"); delay(2000); } /////////////////// void de_energized() { //0-0 en 24V, 1-1 en 5V digitalWrite(ouverture, HIGH); digitalWrite(fermeture, HIGH); delay(20); //>15ms } /////////////////// void ouvre() { //0-1 en 24V, 1-0 en 5V de_energized(); digitalWrite(ouverture, LOW); etat = OUVERT; Serial.println("ouvre"); } /////////////////// void ferme() { //1-0 en 24V, 0-1 en 5V de_energized(); digitalWrite(fermeture, LOW); etat = FERME; Serial.println("ferme"); } /////////////////// void loop() { //code de test pour lire l'état de la sortie du controleur CS9 //Serial.print("etat: "); //Serial.println(digitalRead(commande),DEC); char commande_actuelle = digitalRead(commande); if ((etat == OUVERT) && (commande_actuelle == FERME)) ferme(); if ((etat == FERME) && (commande_actuelle == OUVERT)) ouvre(); } //code de test pour séquences /* ouvre(); delay(5000); ferme(); delay(5000); */ ///////////////////
<html> <iframe width=“560” height=“315” src=“https://www.youtube.com/embed/wIL3zw_jluQ” frameborder=“0” allow=“accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture” allowfullscreen></iframe> </html>
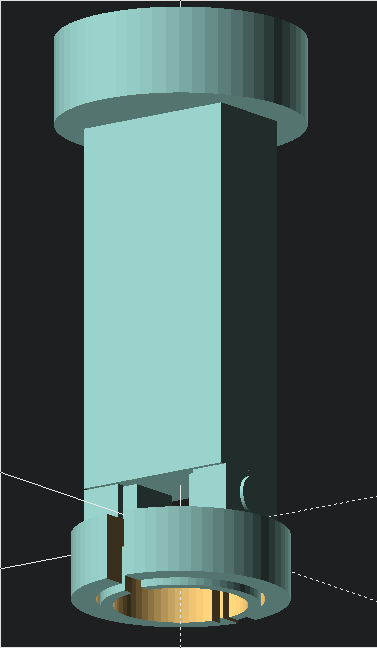
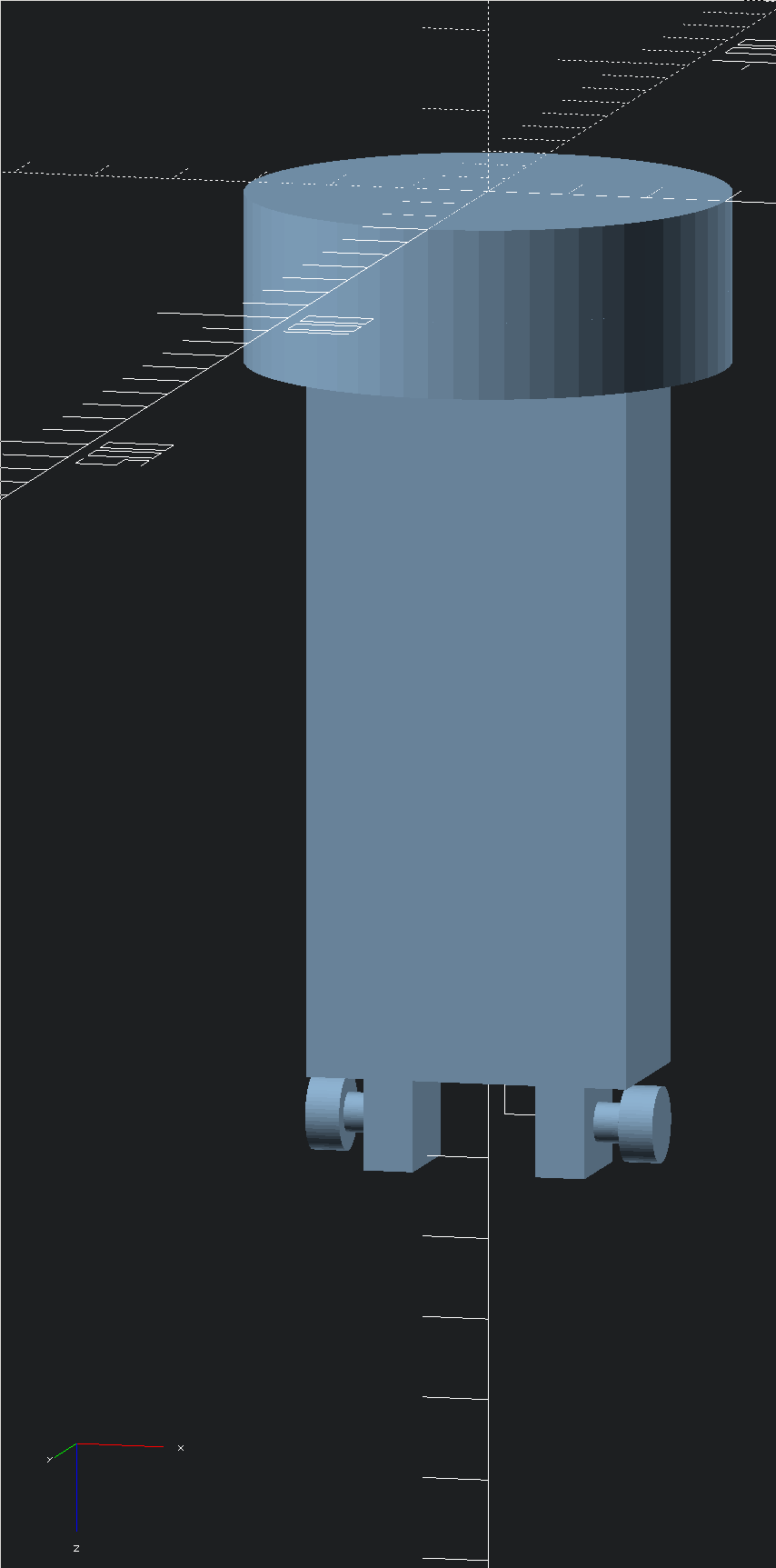
Modélisation de la pince et du préhenseur
Fichier openscad pour générer les différents fichiers STL à importer dans SRS: https://bvdp.inetdoc.net/files/iut/staubliiut/adaptateur_pince_bouchon_iut2021.scad
Rendu pince Schunk+préhenseur bouchon:
Rendu pince Schunk vide pour ajout à SRS en simu:
Prise de cotes:

Photos en place:



Photo de l'environnement du robot:
