Ceci est une ancienne révision du document !
Table des matières
Développement des fonctions de Bases pour splines cubiques non uniformes NUCS
site avec demo: http://www.inf.ed.ac.uk/teaching/courses/cg/d3/nonbspline.html
exercice: http://www.math.ucla.edu/~baker/pdf/pp_nonuniform.pdf
Papiers: https://theses.lib.vt.edu/theses/available/etd-100699-171723/unrestricted/chapter4.PDF
http://graphics.cs.cmu.edu/nsp/course/15-464/Fall05/papers/kimKimShin.pdf
http://ftp.cs.wisc.edu/Approx/bsplbasic.pdf
http://www.maths.lse.ac.uk/Personal/jruf/papers/ruf_bspline.pdf
http://webee.technion.ac.il/Sites/People/YoninaEldar/Download/ME04c.pdf
https://fr.wikipedia.org/wiki/B-spline



Implémentation Matlab
- nucs.m
function nucs( ) %Non-uniform cubic B-splines NON CUMULATIVES %b. Vandeportaele %d'après http://graphics.cs.cmu.edu/nsp/course/15-464/Fall05/papers/kimKimShin.pdf close all clear all %%%%IMPORTANT%%%%%%%%% %pour spline linéaire %k=2 %pour spline quadratique %k=3 %pour spline cubique k=4;% pour avoir 3 fonctions de base non nulles entre t=3 et t=4. Il s'agit de B0 à B3 %j'affiche les fonctions de base en surnombre, mais en fait il suffit de %regarder les 4 fonctions de base sur l'intervale t=3 à t=4. et de %substituer les indices pour les P et les t for numerotest=1:2 figure hold on axis equal if numerotest==1 %pour distribution uniforme title('pour distribution uniforme'); P0=2; t0=0; P1=3; t1=1; P2=4; t2=2; P3=5; t3=3; %more points P4=6; t4=4; P5=7; t5=5; P6=8; t6=6; P7=9; t7=7; P8=10; t8=8; P9=11; t9=9; else %pour distribution non uniforme title('pour distribution non uniforme'); t1=1.1; t2=2.9; end %rangement dans des vecteurs listt=[t0;t1;t2;t3;t4;t5;t6;t7;t8;t9]; listp=[P0;P1;P2;P3;P4;P5;P6;P7;P8;P9]; %affichage des points de contrôle plot(listt, listp,'ko'); Base=zeros(4,1); for t=0:0.01:9 pt=0; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %pour indices de 0 à +3: plus simple à comprendre mais ne gère pas %bien les 3 premiers points de la spline; ce sera la version à %implémenter lorsque l'on changera les indices au fûr et à mesure %for i=0:5 % Base(i +1) = B( i,k,t,listt); % pt=pt+listp(i +1)*Base(i +1); %end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %pour indices de -2 à +5: permet une visu correcte de la courbe %pour qu'elle passe par les points de contrôle %je suis obligé de ranger les fonctions de bases en décalé... %je n'affiche pas ces 2 fonctions de base B-2 et B-1 sur la figure %mais elles sont utilisées pour le calcul de pt if k==2 indiceBaseMin=-1; elseif k==3 indiceBaseMin=-2; %ce n'est pas correct, il y a un offset... avec -1 aussi... ce n'est pas forcément grave car on s'intéresse aux splines cubiques else %k==4 indiceBaseMin=-2; end for i=indiceBaseMin:5 Base(-indiceBaseMin+ i +1) = B( i,k,t,listt); pt=pt+listp(-indiceBaseMin+ i +1)*Base(-indiceBaseMin+ i +1); end %Base %sum(Base) plot(t,Base(1),'gx'); plot(t,Base(2),'bx'); plot(t,Base(3),'kx'); plot(t,Base(4),'mx'); %affiche les fonctions de bases suivantes... plot(t,Base(5),'yx'); plot(t,Base(6),'cx'); %la courbe interpolée plot(t,pt,'r+'); end legend('PI','B0','B1','B2','B3','B4','B5','p(t)'); ylabel('p'); xlabel('t'); end end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function [ val ] = B( i,k,t,listt) %for first index=1 because of matlab if (i>=0) ti=listt(i + 1); else ti=listt(1); end if (i+1>=0) tip1=listt(i+1 + 1); else tip1=listt(1); end if (i+k>=0) tipk=listt(i+k + 1); else tipk=listt(1); end if (i+k-1>=0) tipkm1=listt(i+k-1 + 1); else tipkm1=listt(1); end if k==1 if (ti<= t) && (t<tip1) val = 1 ; else val = 0 ; end return; else if (tipkm1 -ti) ~=0 val1= ((t- ti) / (tipkm1 -ti)) * B( i,k-1,t,listt); else val1= 0; end if (tipk - tip1)~=0 %version http://graphics.cs.cmu.edu/nsp/course/15-464/Fall05/papers/kimKimShin.pdf val2= ((tipk - t) / (tipk - tip1)) * B( i+1,k-1,t,listt); %version http://www.inf.ed.ac.uk/teaching/courses/cg/d3/nonbspline.html %il y a une erreur! %val2= ((tipk - t) / (tipkm1 - ti)) * B( i+1,k-1,t,listt); %autre version foireuse en (4.7 de https://theses.lib.vt.edu/theses/available/etd-100699-171723/unrestricted/chapter4.PDF) %val2= ((tip1 - t) / (tipk - tip1)) * B( i+1,k-1,t,listt); else val2= 0; end val=val1+val2; return; end end
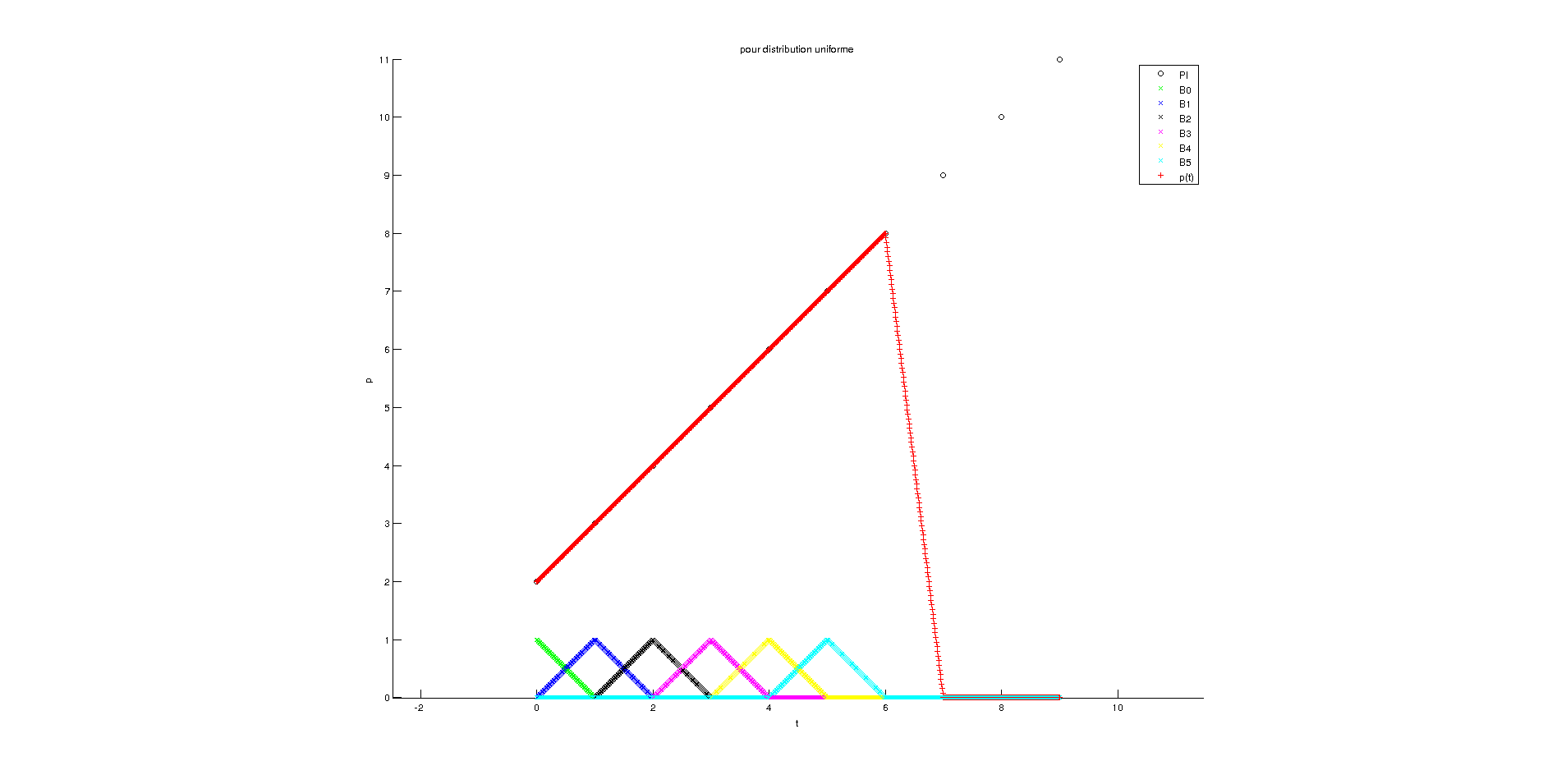
Résultat pour distribution uniforme et k=2
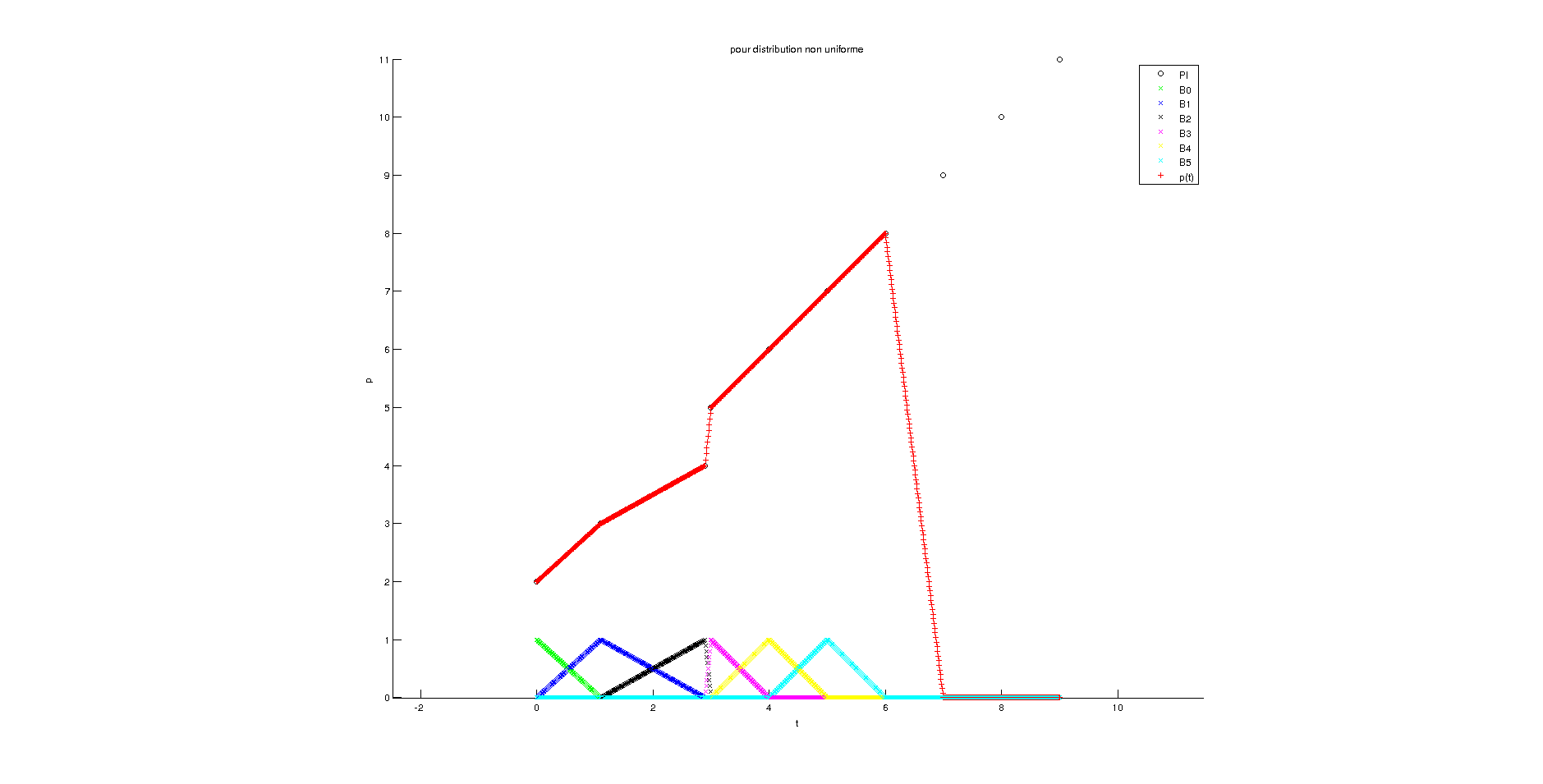
Résultat pour distribution non uniforme et k=2
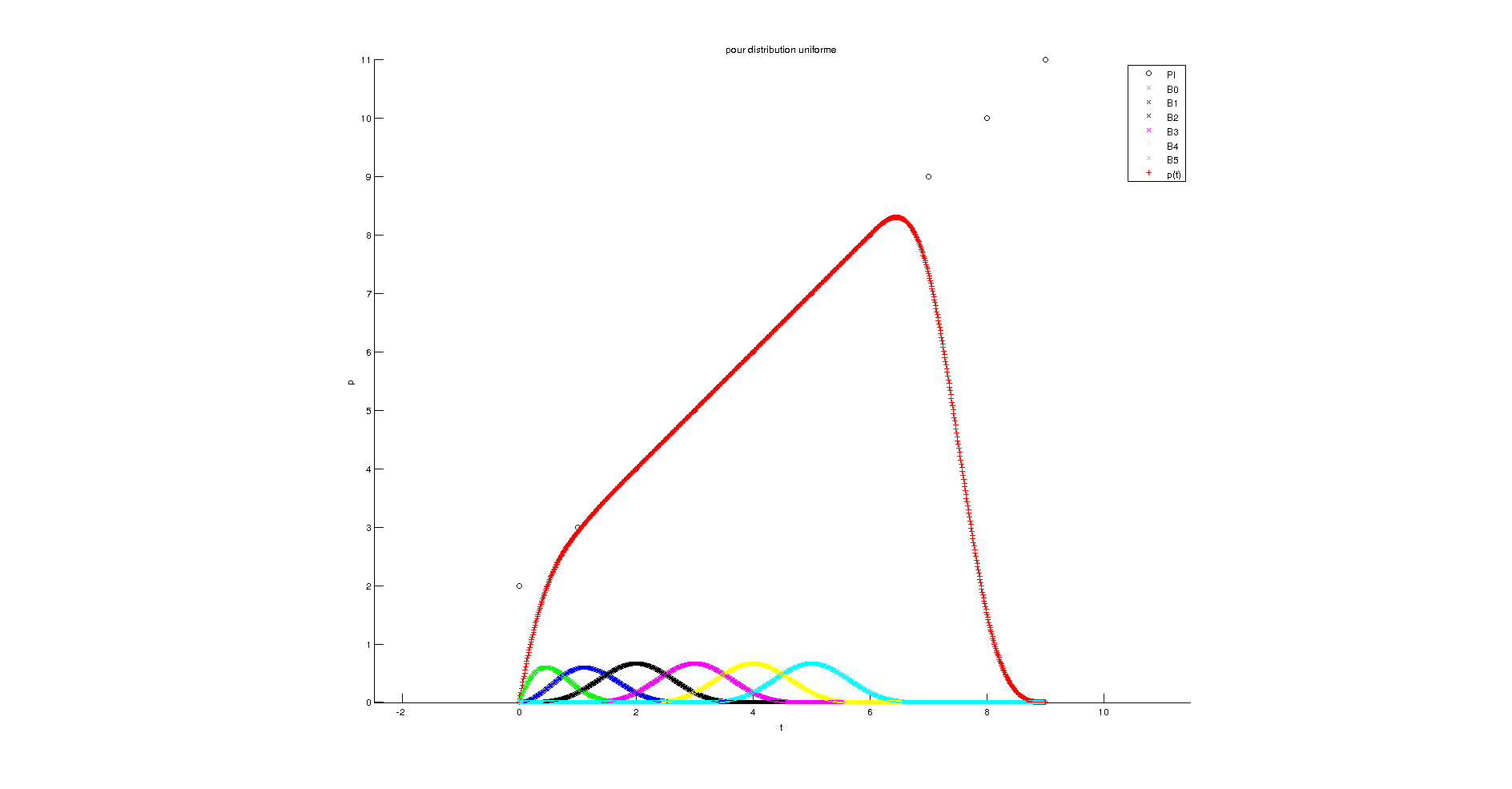
Résultat pour distribution uniforme et k=4
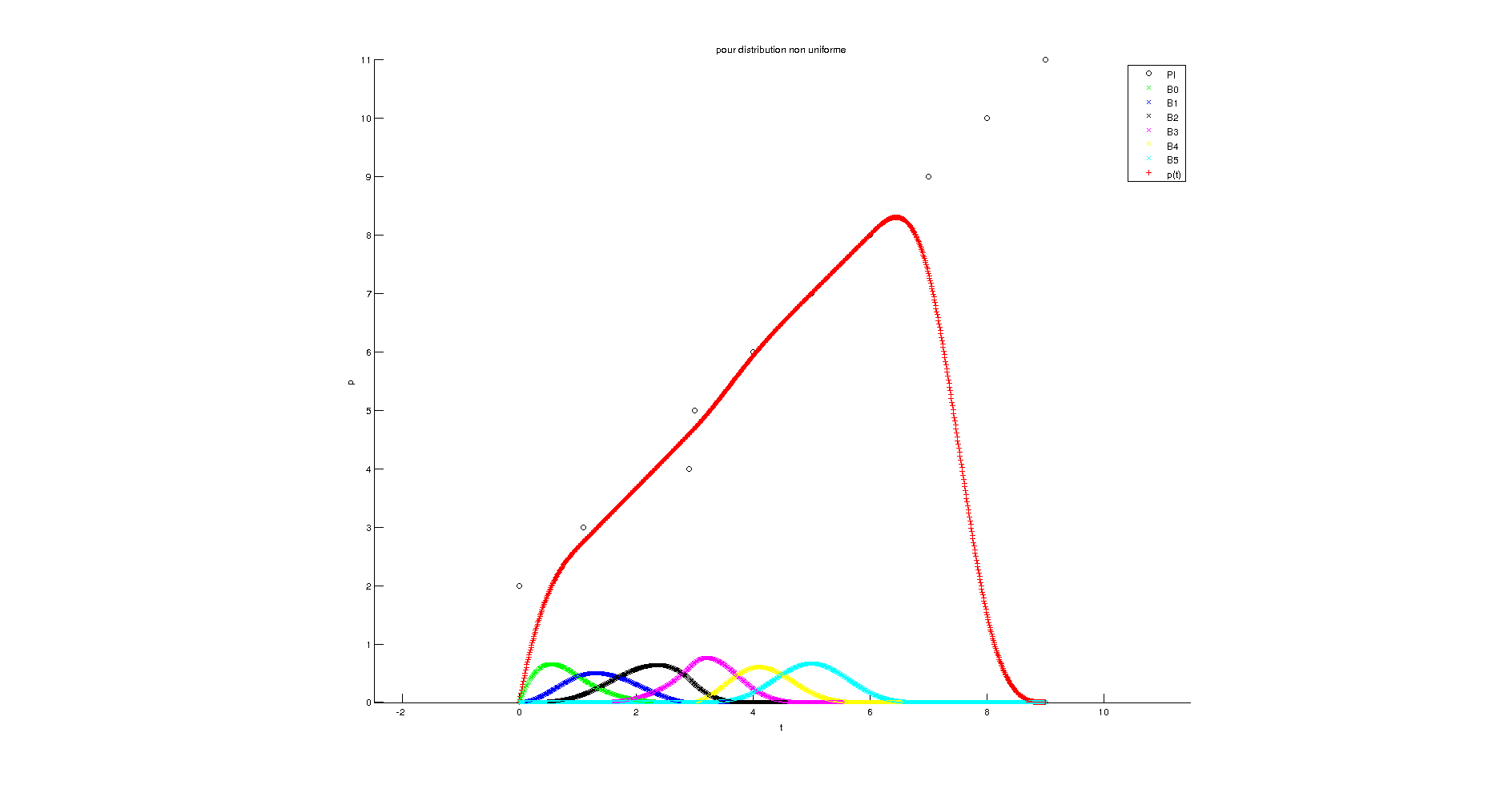
Résultat pour distribution non uniforme et k=4
Calcul des fonctions de base jusqu'à k=3 en considérant une distribution uniforme
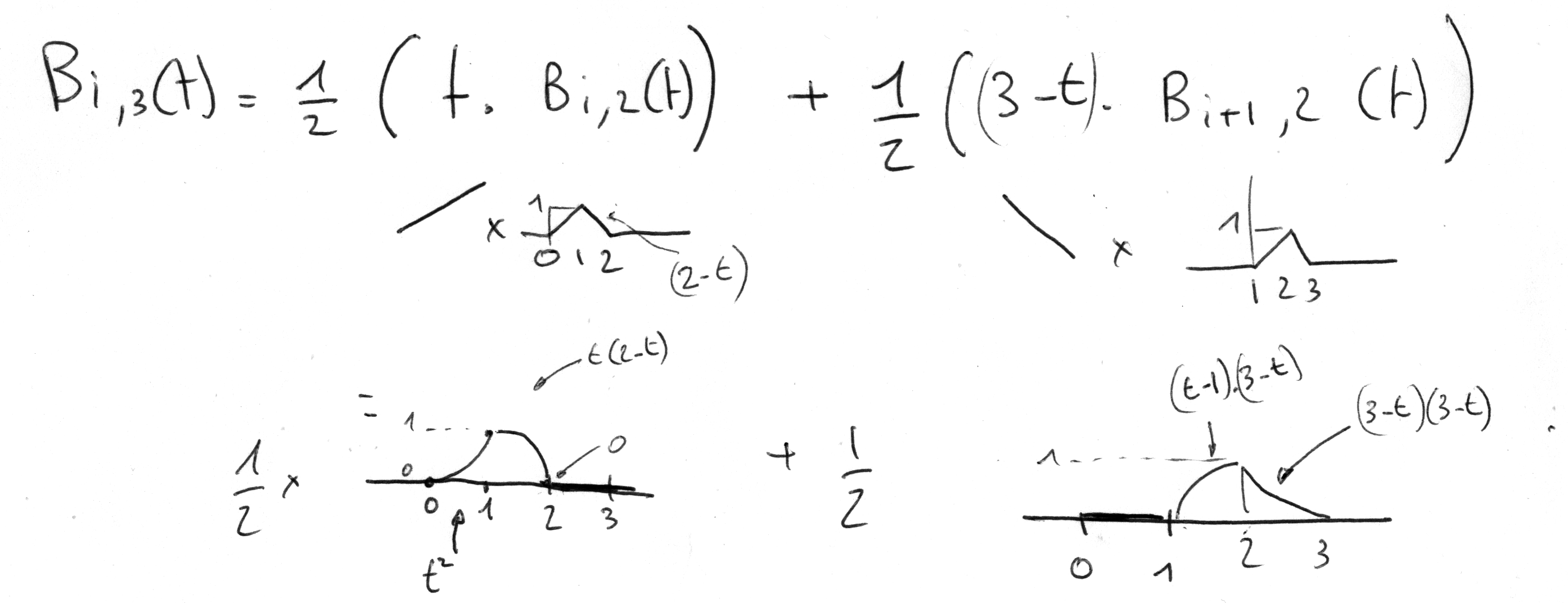
Développement de l'équation de récurrence
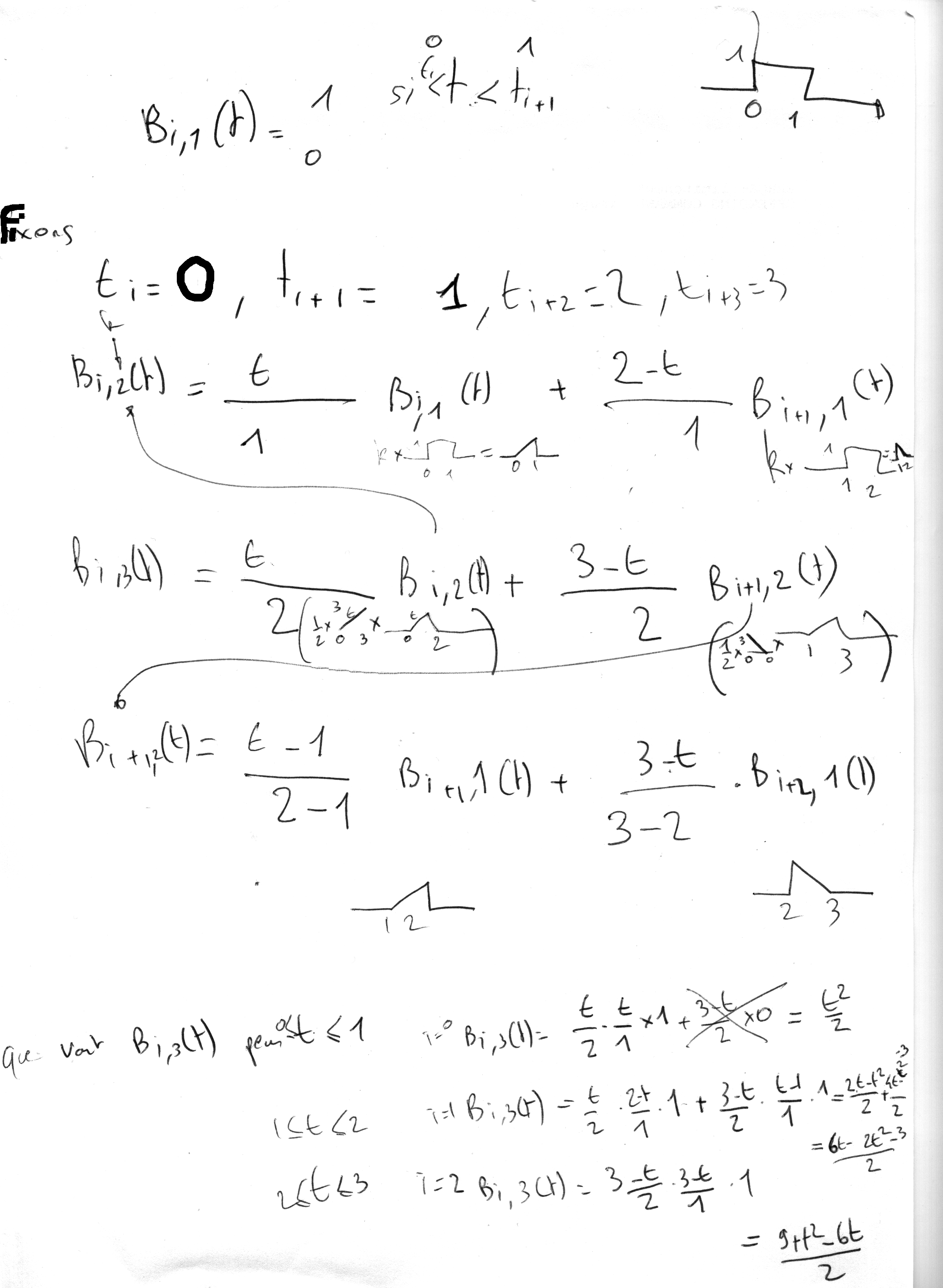
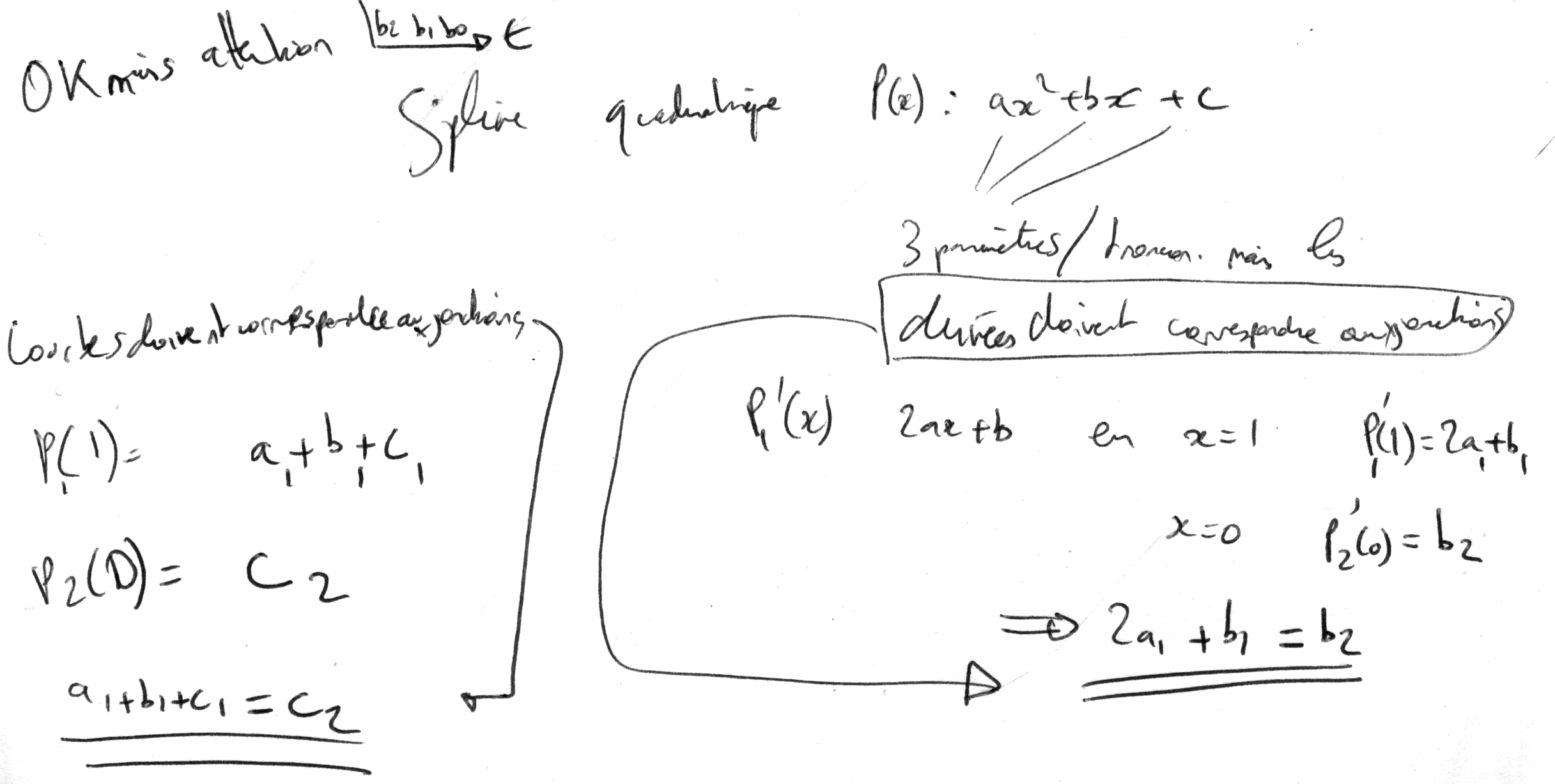
Dernière étape du développement de l'équation de récurrence pour splines quadratiques
- etudebaseu_non_cumulatif.m
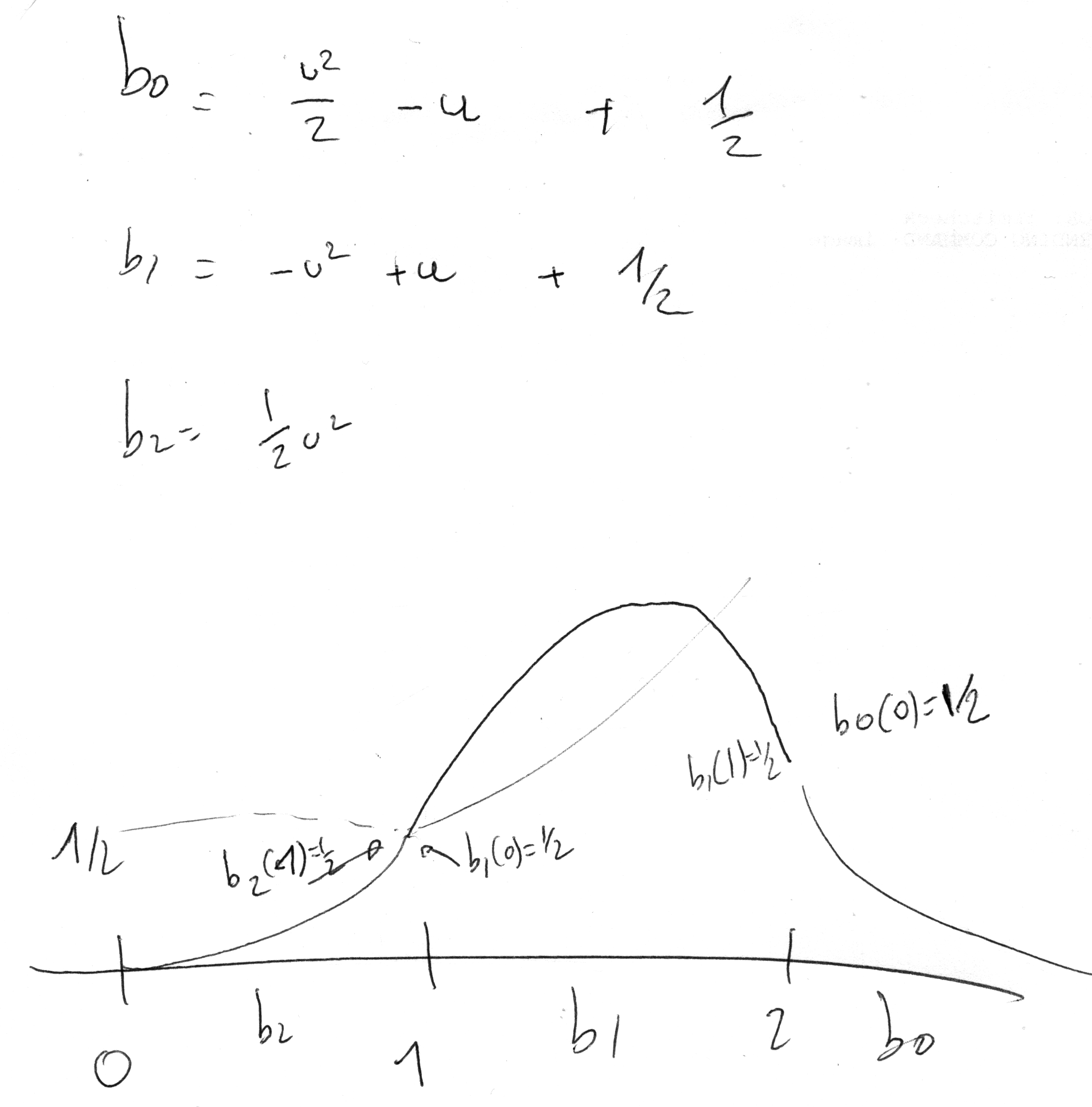
%B. Vandeportaele 2017 %étude du comportement des différentes fonctions de bases pour l'interpolation close all for ncurve=1:5 figure hold on tb=[]; for u=0:0.01:1 % b0=1; % b1=(u^3 -3*u^2 +3*u +5 )/6; % b2=(-2*u^3 +3*u^2 +3*u +1 )/6; % b3=(u^3 )/6; %à partir du papier de Huixian, matrice M3 exprimée en colone %spline de degré 3 if ncurve==1 b0=(-1*u^3 +3*u^2 -3*u +1 )/6; b1=(3*u^3 -6*u^2 +0*u +4 )/6; b2=(-3*u^3 +3*u^2 +3*u +1 )/6; b3=(u^3 )/6; elseif ncurve==2 b0=(-3*u^2 +6*u -3 )/6; b1=(9*u^2 -12*u +0 )/6; b2=(-9*u^2 +6*u +3 )/6; b3=(3*u^2 )/6; elseif ncurve==3 b0=(-6*u +6 )/6; b1=(18*u -12 )/6; b2=(-18*u +6 )/6; b3=(6*u )/6; elseif ncurve==4 % b0=(0.5 * u^2 ); % b1=(-u^2 +3*u -3/2 ); % b2=(0.5*u^2-3*u +9/2 ); % b3=0; % %Kaihuai M3 entre (8) et (9) % A B C b0=0.5*(1 - 2*u + 1 * u^2 ); % 1/2 -1 1/2 b1=0.5*(1 + 2*u + -2 * u^2 ); % -1 1 1/2 b2=0.5*( u^2 ); % 1/2 0 0 b3=0; elseif ncurve==5 %dérivée du cas précédent b0=0.5*(-2 + 2*u ); b1=0.5*(2 - 4*u ); b2=0.5*(2* u ); b3=0; end tb=[tb;u,b0,b1,b2,b3,b0+b1+b2+b3]; end plot (tb(:,1),tb(:,2),'r-'); plot (tb(:,1),tb(:,3),'g-'); plot (tb(:,1),tb(:,4),'b-'); plot (tb(:,1),tb(:,5),'k-'); plot (tb(:,1),tb(:,6),'c-'); %recolle les différentes fonctions de base pour illustrer le poids d'un %Omega pour u^ évoluant de 0 à 4 plot (tb(:,1)+1*ones(size(tb(:,1))),tb(:,4),'b-'); plot (tb(:,1)+2*ones(size(tb(:,1))),tb(:,3),'g-'); plot (tb(:,1)+3*ones(size(tb(:,1))),tb(:,2),'r-'); legend('b0','b1','b2','b3','somme'); end %retrouve l'expression polynomiale par morceau des Bi à partir de %l'expression récurente figure hold on axis equal % 2*b2=u^2 => b2=1/2 . u^2 %b2 est défini entre 0 et 1 donc pas de changement for u=0:0.01:1 plot (u,(1/2)*u^2,'b+'); end for u=1:0.01:2 plot (u,(1/2)*u*(2-u),'r+'); end for u=1:0.01:2 plot (u,(1/2)*(u-1)*(3-u),'g+'); end %2*b1 obtenu par somme de r+ et g+ %2*b1= (u*(2-u))+((u-1)*(3-u)) = 2u -u^2 + 3u -u^2 -3 +u = -2u^2 +6u -3 %b1= -u^2 +3u-3/2 for u=1:0.01:2 plot (u,(1/2)*((u*(2-u))+((u-1)*(3-u))),'y+'); end %ce b1 est défini entre 1 et 2 donc il faut faire un changement de variable %u'=(u+1) %b'1= -(u+1)^2 +3(u+1)-3/2 % -u^2 -1 -2u +3u +3 -3/2 % -u^2 +u +1/2 %affiche b'1 entre 0 et 1 for u=0:0.01:1 plot (u,( -u^2 +u +1/2),'yo'); end %2*b0 %2*b0=(3-u)*(3-u)=9+u^2-6u %b0= 1/2 u^2 -3u +9/2 for u=2:0.01:3 plot (u,(1/2)*(3-u)*(3-u),'k+'); end %ce b2 est défini entre 2 et 3 donc il faut faire un changement de variable %u'=(u+2) %b'2= 1/2 (u+2)^2 -3(u+2) +9/2 % = 1/2 (u^2 + 4 + 4u) -3u-6 +9/2 % = 1/2 u^2 + 2 + 2u -3u-6 +9/2 % = 1/2 u^2 -1u +1/2 %affiche 2*b'2 entre 0 et 1 for u=0:0.01:1 plot (u,((1/2)*u^2 -u +1/2),'ko'); end
NURBS
Attention les nurbs n'utilisent pas des fonctions de bases polynomiales mais des ratios…
extrait de https://fr.wikipedia.org/wiki/NURBS?veaction=edit

on s'intéresse à  :
:
Développement:





BSpline Non Uniforme
Développement des fonctions de base des BSpline non uniformes:

En utilisant cette définition, il est possible de calculer successivement les fonctions de base pour différents degrés en utilisant la formulation de récurrence de De Boor-Cox. Nous avons ainsi



Après reformulation, on obtient:


on peut développer la fonction de base pour k=4 tel que:
