#!/usr/bin/python3
#B. Vandeportaele 31/12/2019
import cv2 as cv
import numpy as np
#https://docs.opencv.org/master/db/d5b/tutorial_py_mouse_handling.html
#pour afficher la liste des évenements possibles
#events = [i for i in dir(cv) if 'EVENT' in i]
#print( events )
#homography:
# https://docs.opencv.org/2.4/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html?highlight=findhomography
# cv2.findHomography(srcPoints, dstPoints[, method[, ransacReprojThreshold[, mask]]]) → retval, mask
#You can use only inliers (i.e. points with corresponding mask value equals to 1) when doing your match.
'''
#https://stackoverflow.com/questions/50945385/python-opencv-findhomography-inputs
if len(good) > MIN_MATCH_COUNT:
src_pts = np.float32([kp1[m.queryIdx].pt for m in good]).reshape(-1, 1, 2)
dst_pts = np.float32([kp2[m.trainIdx].pt for m in good]).reshape(-1, 1, 2)
'''
#enregistrement et lecture fichiers
#https://docs.scipy.org/doc/numpy/reference/generated/numpy.savetxt.html
#https://docs.scipy.org/doc/numpy/reference/generated/numpy.genfromtxt.html
if False:
savePoints = np.float32((46, 82, 201, 30, 340, 85, 182, 144)).reshape(4,2)
np.savetxt('test.out', savePoints, delimiter=',', fmt='%10.4f')
filedata = np.genfromtxt('test.out', delimiter=',').astype('int32')
print(filedata)
exit()
if False:
#test pour estimer une homographie unité:
srcPoints=np.float32( (1,2,1,4,5,9,7,8)).reshape(-1, 1, 2)
dstPoints=srcPoints
(retval, mask)= cv.findHomography(srcPoints, dstPoints)
print("srcPoints")
print(srcPoints)
print("retval")
print(retval)
print("mask")
print(mask)
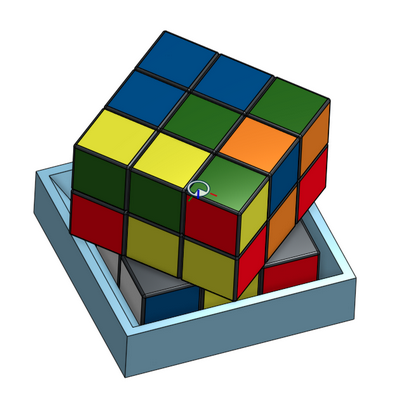
#rubikscube
# pour l'apprentissage, donner les 4 coins de la face supérieure + 6 points pour apprendre les 6 couleurs de faces
#éventuellement traiter les images en live pour pouvoir tourner le cube pendant l'apprentissage des couleurs
image = cv.imread("rubiks.jpg", cv.IMREAD_UNCHANGED)
if image is None: # ne pas utiliser ==
print("image non trouvee");
listeColors=["Blue","Red","White","Green","Orange","Yellow"]
#listePositions=[(88,80),(188,125),(137,101),(198,44),(298,82),(192,84)]
#apprentissage des couleurs sur la face top (pour le rouge)
listePositions=[[88,80],[188,125],[137,101],[198,44],[298,82],[192,84]] #coordonée U puis V données par geeqie
#apprentissage des couleurs sur la face front (pour le rouge)
#listePositions=[[88,80],[210,243],[137,101],[198,44],[298,82],[192,84]] #coordonée U puis V données par geeqie
listeRGB=[]
print(listeColors)
i=0
for color in listeColors:
print(color)
listeRGB.append( image[ listePositions[i][1],listePositions[i][0] ]) #coordonée V puis U
i=i+1
print(listeRGB)
#exit()
#coordonnées obtenues avec geeqie,Affichage,infos sur le pixel
#points dans le sens horaires
for numface in range(0, 3): #trois faces pour débug
#for numface in range(0, 1): #une seule face pour débug
if numface==0:
#https://docs.scipy.org/doc/numpy/reference/generated/numpy.reshape.html
#srcPoints = np.float32((46,82,201,30,340,85,182,144)).reshape(-1, 1, 2)
srcPoints = np.float32((46, 82, 201, 30, 340, 85, 182, 144)).reshape(4,2)
elif numface==1:
#srcPoints = np.float32((40,90,190,154,180,352,49,279)).reshape(-1, 1, 2)
srcPoints = np.float32((40, 90, 190, 154, 180, 352, 49, 279)).reshape(4, 2)
elif numface==2:
#srcPoints = np.float32((186,152,347,92, 346,282,190,351)).reshape(-1, 1, 2)
srcPoints = np.float32((186, 152, 347, 92, 346, 282, 190, 351)).reshape(4, 2)
sizedest=30
dstPoints = np.float32((0,0,sizedest-1,0,sizedest-1,sizedest-1,0,sizedest-1)).reshape(-1, 1, 2)
(H, mask) = cv.findHomography(srcPoints, dstPoints)
print("srcPoints")
print(srcPoints)
print("retval")
print(H)
print("mask")
print(mask)
#fonction warpPespective:
#https://docs.opencv.org/2.4/modules/imgproc/doc/geometric_transformations.html?highlight=warpperspective#void%20warpPerspective(InputArray%20src,%20OutputArray%20dst,%20InputArray%20M,%20Size%20dsize,%20int%20flags,%20int%20borderMode,%20const%20Scalar&%20borderValue
dst=cv.warpPerspective(image, H, (sizedest,sizedest))
cv.imwrite('rubiksrect'+str(numface)+'.png', dst)
#recherche pour chaque pixel la couleur la plus proche
for u in range(0,sizedest):
for v in range(0, sizedest):
val=dst[v,u]
listfdiff=[]
for c in range(0,6): #pour chaque couleur à tester
diff=0
for comp in range(0,3): #pour chacune des composantes de la couleur
#print(listeRGB[c][comp])
#print(val[comp])
#print((listeRGB[c][comp]) - (val[comp]))
# RuntimeWarning: overflow encountered in ubyte_scalars
#print(abs( listeRGB[c][comp]-val[comp]) )
diff = diff+abs( int(listeRGB[c][comp])-int(val[comp])) #cast en int
#print("diff:" +str(diff))
listfdiff.append(diff)
#print("listeRGB[c]" + str(listeRGB[c])+ str(val)+" diff= "+str(diff))
l=listfdiff.index(min(listfdiff)) #indice du plus petit élément de la liste de différence
#print(u,v,val,listfdiff,l)
#if listfdiff[l]<150:
dst[v,u]=listeRGB[l]
#else:
# dst[v, u] = [0,0,0]
cv.imwrite('rubiksrect'+str(numface)+'_label.png', dst)
#https: // docs.opencv.org / trunk / df / d9d / tutorial_py_colorspaces.html
if False:
# Convert BGR to HSV
hsv = cv.cvtColor(dst, cv.COLOR_BGR2HSV)
cv.imwrite('rubiksrect_hsv'+str(numface)+'.png', hsv)
#en HSV pour calculer distance entre couleur il faut tenir compte du fait qu'il y a modulo 2Pi sur la teinte (codé modulo 180)
'''
#######################################################
# mouse callback function
def draw_circle(event,x,y,flags,param):
if event == cv.EVENT_LBUTTONDBLCLK:
cv.circle(img,(x,y),100,(255,0,0),-1)
#######################################################
def nothing(x):
pass
#######################################################
if False:
# Create a black image, a window and bind the function to window
img = np.zeros((512,512,3), np.uint8)
cv.namedWindow('image')
cv.setMouseCallback('image',draw_circle)
while(1):
cv.imshow('image',img)
if cv.waitKey(20) & 0xFF == 32 : # barre espace pour sortir ? 27: #escape?
break
cv.destroyAllWindows()
else:
drawing = False # true if mouse is pressed
mode = True # if True, draw rectangle. Press 'm' to toggle to curve
ix,iy = -1,-1
# mouse callback function
def draw_circle2(event,x,y,flags,param):
global ix,iy,drawing,mode
# get current positions of four trackbars
r = cv.getTrackbarPos('R', 'image')
g = cv.getTrackbarPos('G', 'image')
b = cv.getTrackbarPos('B', 'image')
#s = cv.getTrackbarPos(switch, 'image')
if event == cv.EVENT_LBUTTONDOWN:
drawing = True
ix,iy = x,y
elif event == cv.EVENT_MOUSEMOVE:
if drawing == True:
if mode == True:
#cv.rectangle(img,(ix,iy),(x,y),(0,255,0),-1)
cv.rectangle(img, (ix, iy), (x, y), (r,g,b), -1)
else:
cv.circle(img,(x,y),5,(0,0,255),-1)
elif event == cv.EVENT_LBUTTONUP:
drawing = False
if mode == True:
#cv.rectangle(img,(ix,iy),(x,y),(0,255,0),-1)
cv.rectangle(img, (ix, iy), (x, y), (r, g, b), -1)
else:
cv.circle(img,(x,y),5,(0,0,255),-1)
cv.line(img, (ix,iy), (x, y), (255, 255, 0), 5)
img = np.zeros((512,512,3), np.uint8)
cv.namedWindow('image')
# create trackbars for color change
cv.createTrackbar('R', 'image', 0, 255, nothing)
cv.createTrackbar('G', 'image', 0, 255, nothing)
cv.createTrackbar('B', 'image', 0, 255, nothing)
cv.setTrackbarPos('R', 'image',255)
cv.setMouseCallback('image',draw_circle2)
while(1):
cv.imshow('image',img)
k = cv.waitKey(1) & 0xFF
if k == ord('m'):
mode = not mode
elif k == ord('s'):
cv.imwrite('dessin.png', img)
elif k == 27: #escape?
break
cv.destroyAllWindows()
'''