Table des matières
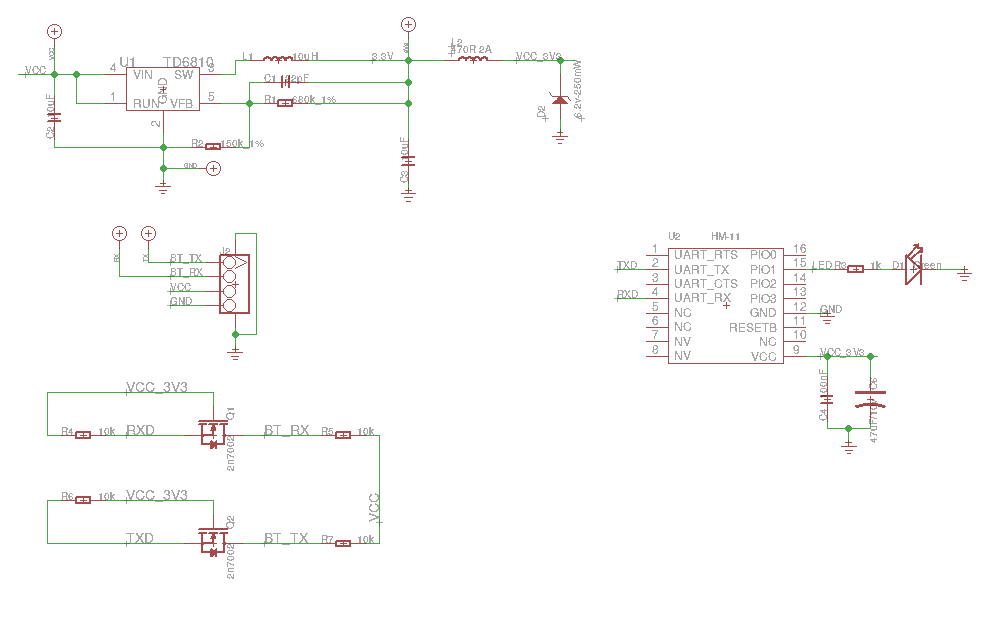
Module Damien HM11
https://www.seeedstudio.com/Grove-Blueseeed-HM11.html
schematique eagle: https://raw.githubusercontent.com/SeeedDocument/Grove-BLE_v1/master/res/Grove-BLE_v1.0.zip
datasheet: https://raw.githubusercontent.com/SeeedDocument/Grove-BLE_v1/master/res/Bluetooth4_en.pdf
module HM10
Documentation
SUPER documentation sur le modules (broches supplémentaires, état et pilotage de la led, récupération infos module avec android,commandes AT etc…) Voir la partie “HM-10 Programmable Pins” pour utiliser 10 GPIO directement sur le module (certaines sont ADC, voir DS18B20).
http://www.martyncurrey.com/hm-10-bluetooth-4ble-modules/
Bonne documentation pour le module, pour utilisation en console notamment: http://fab.cba.mit.edu/classes/863.15/doc/tutorials/programming/bluetooth.html
documentation (commandes AT etc…): ftp://imall.iteadstudio.com/Modules/IM130614001_Serial_Port_BLE_Module_Master_Slave_HM-10/DS_IM130614001_Serial_Port_BLE_Module_Master_Slave_HM-10.pdf
http://wiki.sunfounder.cc/images/f/f8/Bluetooth_4.0_BLE_module_datasheet.pdf
Cablage
Cabler pont diviseur sur la broche 3 qui va du TX arduino au RX module Bluetooth pour abaisser la tension à 3V
La broche TX module Bluetooth est connectée directement à la broche RX arduino 2.
Alimenter le module avec le 5V de l'arduino UNO, il y a un régulateur 3.3V sur le module.
Programme pour dialoguer avec le module et utiliser les commandes AT
Programme pour utiliser l'arduino UNO comme un pont série et permettre le dialogue avec le module Bluetooth depuis une console sur le PC:
- hm10.ino
#include <SoftwareSerial.h> const int Rx = 2; const int Tx = 3; SoftwareSerial ModuleBluetooth(Rx, Tx); unsigned long time=0; /////////////////////////////// void sendCommand(char * chaine){ unsigned long time=0; Serial.print("sending AT command: "); Serial.print(chaine); Serial.print(" -> "); while ((*chaine)!=0){ ModuleBluetooth.write(*chaine); chaine++; } ModuleBluetooth.write('\r'); ModuleBluetooth.write('\n'); time=micros(); while (micros()-time<500000){ //Laisse du temps au module pour répondre, et affiche la réponse dans la console Serial if (ModuleBluetooth.available()) { Serial.write(ModuleBluetooth.read()); } } Serial.println(""); delay(100); } /////////////////////////////// void setup() { // Ouvre la liaison série classique pour communiquer avec le PC Serial.begin(9600); Serial.println("salut"); // Ouvre la liaison série software pour communiquer avec le module bluetooth ModuleBluetooth.begin(9600); time=micros(); delay(200); //sendCommand("AT+RENEW"); //configuration usine sendCommand("AT+RESET"); //reboot sendCommand("AT"); delay(1000); sendCommand("AT+ADDR"); sendCommand("AT+VERSION"); //affiche la version du firmware delay(5000); sendCommand("AT"); sendCommand("AT+ROLE0"); //module en mode Peripheral (0) sendCommand("AT+ROLE"); //module en mode Peripheral (0) Serial.println("c'est parti!"); } /////////////////////////////// void loop() { // put your main code here, to run repeatedly: if (ModuleBluetooth.available()) { Serial.write(ModuleBluetooth.read()); } if (Serial.available()) { ModuleBluetooth.write(Serial.read()); } /* if ((micros()-time)>100000) { Serial.print("+"); time=micros(); } */ /* Serial.print("+"); delay(100); */ }
miniterm.py /dev/ttyUSB0 9600
MODULE hm10 BERTRAND
Le module de bertrand prend des commandes AT terminées par Entrée, celui de Christophe non.
Tests de commandes AT:
AT+VERR? ne répond pas AT+VERSION? +VERSION=Firmware V4.2.0,Bluetooth V4.0 LE AT+NAMEBT05 +NAME=BT05 AT+ADDR? +ADDR=00:13:AA:00:2C:AA AT+CHAR? ERROR=102 AT+UUID? +UUID=0xFFE0 AT+DISC?
Pour établir un pont entre 2 modules bluetooth, régler l'un en Peripheral mode (the default setting) :
AT+ROLE0
et l'autre en Central mode avec Manual Start
AT+IMME1 AT+ROLE1 AT+CON1
Certaines commandes AT fonctionnent pas avec ma copie chinoise à 2 balles… Conclusion, acheter un vrai HM10!
Attention: Les commandes AT ne sont appliquées lorsque le module est éteint puis rallumé.
Liste des commandes AT supportées:
AT+HELP?
- | reponseATHELP
******************************************************************** * Command Description * * ---------------------------------------------------------------- * * AT Check if the command terminal work normally * * AT+RESET Software reboot * * AT+VERSION Get firmware, bluetooth, HCI and LMP version * * AT+HELP List all the commands * * AT+NAME Get/Set local device name * * AT+PIN Get/Set pin code for pairing * * AT+PASS Get/Set pin code for pairing * * AT+BAUD Get/Set baud rate * * AT+LADDR Get local bluetooth address * * AT+ADDR Get local bluetooth address * * AT+DEFAULT Restore factory default * * AT+RENEW Restore factory default * * AT+STATE Get current state * * AT+PWRM Get/Set power on mode(low power) * * AT+POWE Get/Set RF transmit power * * AT+SLEEP Sleep mode * * AT+ROLE Get/Set current role. * * AT+PARI Get/Set UART parity bit. * * AT+STOP Get/Set UART stop bit. * * AT+START System start working. * * AT+IMME System wait for command when power on. * * AT+IBEA Switch iBeacon mode. * * AT+IBE0 Set iBeacon UUID 0. * * AT+IBE1 Set iBeacon UUID 1. * * AT+IBE2 Set iBeacon UUID 2. * * AT+IBE3 Set iBeacon UUID 3. * * AT+MARJ Set iBeacon MARJ . * * AT+MINO Set iBeacon MINO . * * AT+MEA Set iBeacon MEA . * * AT+NOTI Notify connection event . * * AT+UUID Get/Set system SERVER_UUID . * * AT+CHAR Get/Set system CHAR_UUID . * * -----------------------------------------------------------------* * Note: (M) = The command support slave mode only. * * For more information, please visit http://www.cyobd.com * * Copyright@2013 www.cyobd.com. All rights reserved. * ********************************************************************
Utilisation via terminal bluetooth
Le module est vu comme un périphérique bluetooth BT05
Applications à installer
BLE Scanner sur Android: https://play.google.com/store/apps/details?id=com.macdom.ble.blescanner&hl=en
Détecter le composant BT05 et afficher les informations le concernant. le BT05 est connected mais not-bonded (lié)
Serial Bluetooth Terminal: https://play.google.com/store/apps/details?id=de.kai_morich.serial_bluetooth_terminal&hl=fr
Lancer l'application puis options→Device→Bluetooth LE→SCAN . Cliquer sur connect à BT05. Ensuite le terminal sur le téléphone échange les caractères ASCII avec le module (éventuellement redirigés sur UART Serial de l'Arduino grâce au programme hm10.ino )
Pour que le module fonctionne dans cette configuration il faut qu'il soit en:
AT+ROLE0
La LED du module clignote tant qu'il n'est pas appairé. Si la LED ne clignote pas c'est que l'application terminal du téléphone est appairée avec le module HM10 et donc celui ci ne tiendra pas compte des commandes AT. Il faut alors déconnecter l'application terminal du téléphone pour saisir les commandes AT.
Différents états pour un module bluetooth
Explication des termes Connected,Paired,Bonded et Whitelisted: https://devzone.nordicsemi.com/f/nordic-q-a/11939/connecting-bonding-pairing-and-whitelists/45217#45217
This is a short description of the terms, and how they are linked together:
- Connection: A central (master) can connect to a peripheral (slave). While the connection is active the master and slave will communicate regularly at a determined interval. This connection interval can be between 7.5 ms and 4 s.
- Pairing: Devices that are initially connected can exchange encryption keys and encrypt the link. When they have, the link is secure and they are paired.
- Bonding: Paired devices can be bonded. This means that they store the keys that have already been exchanged when they paired and use those again the next time they connect.
- Whitelisting: The whitelist is used to restrict connection or scanning from any other than predetermined (known) devices.
Configuration sous linux
le module est vu comme un périphérique bluetooth BT05
super doc sur bluetooth sous linux: https://www.pcsuggest.com/linux-bluetooth-setup-hcitool-bluez/ et https://www.pcsuggest.com/bluetooth-linux-part-2/
Commandes linux sur: http://denethor.wlu.ca/arduino/bluetooth.shtml
hcitool dev Devices: hci0 64:80:99:F8:2C:34 hciconfig -a hci0: Type: BR/EDR Bus: USB BD Address: 64:80:99:F8:2C:34 ACL MTU: 1021:5 SCO MTU: 96:6 UP RUNNING PSCAN ISCAN RX bytes:2736 acl:31 sco:0 events:258 errors:0 TX bytes:33050 acl:31 sco:0 commands:212 errors:0 Features: 0xff 0xfe 0x0f 0xfe 0xdb 0xff 0x7b 0x87 Packet type: DM1 DM3 DM5 DH1 DH3 DH5 HV1 HV2 HV3 Link policy: RSWITCH HOLD SNIFF Link mode: SLAVE ACCEPT Name: 'rapid' Class: 0x0c010c Service Classes: Rendering, Capturing Device Class: Computer, Laptop HCI Version: 4.0 (0x6) Revision: 0x1000 LMP Version: 4.0 (0x6) Subversion: 0x1000 Manufacturer: Intel Corp. (2)
Pour configurer l'interface Bluetooth en master
sudo hciconfig -a hci0 lm master hciconfig -a hci0: Type: BR/EDR Bus: USB BD Address: 64:80:99:F8:2C:34 ACL MTU: 1021:5 SCO MTU: 96:6 UP RUNNING PSCAN ISCAN RX bytes:3290 acl:31 sco:0 events:264 errors:0 TX bytes:33068 acl:31 sco:0 commands:218 errors:0 Features: 0xff 0xfe 0x0f 0xfe 0xdb 0xff 0x7b 0x87 Packet type: DM1 DM3 DM5 DH1 DH3 DH5 HV1 HV2 HV3 Link policy: RSWITCH HOLD SNIFF Link mode: MASTER Name: 'rapid' Class: 0x0c010c Service Classes: Rendering, Capturing Device Class: Computer, Laptop HCI Version: 4.0 (0x6) Revision: 0x1000 LMP Version: 4.0 (0x6) Subversion: 0x1000 Manufacturer: Intel Corp. (2)
à partir de la il devient possible de se connecter au module BT05
Pour scanner les périphériques Low Energy
sudo hcitool lescan
bluetoothctl [NEW] Controller 64:80:99:F8:2C:34 rapid [default] [NEW] Device 00:13:AA:00:2C:AA BT05 [bluetooth]# list Controller 64:80:99:F8:2C:34 rapid [default] [bluetooth]# scan on Discovery started [CHG] Controller 64:80:99:F8:2C:34 Discovering: yes [bluetooth]# connect 00:13:AA:00:2C:AA Attempting to connect to 00:13:AA:00:2C:AA Connection successful [BT05]# info Device 00:13:AA:00:2C:AA Name: BT05 Alias: BT05 Paired: yes Trusted: yes Blocked: no Connected: yes LegacyPairing: no UUID: Generic Access Profile (00001800-0000-1000-8000-00805f9b34fb) UUID: Generic Attribute Profile (00001801-0000-1000-8000-00805f9b34fb) UUID: Device Information (0000180a-0000-1000-8000-00805f9b34fb) UUID: Unknown (0000ffe0-0000-1000-8000-00805f9b34fb) Modalias: bluetooth:v000Dp0000d0110
[BT05]# disconnect Attempting to disconnect from 00:13:AA:00:2C:AA Successful disconnected [CHG] Device 00:13:AA:00:2C:AA Connected: no [CHG] Device 00:13:AA:00:2C:AA RSSI: -42
Utilisation du bluetooth via python
Terminal Bluetooth sous linux
http://pi19404.github.io/pyVision/2015/04/03/22/
Installation des paquets:
sudo apt-get install bluez bluez-tools
liste des fichiers de ces paquets:
dpkg -L bluez /usr/bin/bccmd /usr/bin/hciattach /usr/bin/bluetoothctl /usr/bin/gatttool /usr/bin/bluemoon /usr/bin/rctest /usr/bin/hex2hcd /usr/bin/obexctl /usr/bin/btmgmt /usr/bin/sdptool /usr/bin/l2test /usr/bin/ciptool /usr/bin/rfcomm /usr/bin/hcitool /usr/bin/l2ping /usr/bin/btmon /usr/bin/btattach ... dpkg -L bluez-tools /usr/bin/bt-network /usr/bin/bt-device /usr/bin/bt-obex /usr/bin/bt-adapter /usr/bin/bt-agent ...
NB: il existe un paquet python: python-bluez/xenial 0.22-1 amd64
bluez-simple-agent hci0 00:13:AA:00:2C:AA RequestPinCode (/org/bluez/3772/hci0/dev_98_D3_31_30_1A_BA) Enter PIN Code: 1234 Release New device (/org/bluez/3772/hci0/dev_98_D3_31_30_1A_BA)
bluez-simple-agent n'est pas contenu dans les paquets installés: “The functionality of bluez-simple-agent seems to have been replaced by bluetoothctl.”
bluez-simple-agent remplacé par simple-agent?
apt-file search simple-agent bluez-tests: /usr/share/doc/bluez-tests/examples/simple-agent.gz
Création d'un fichier associé au périphérique bluetooth
http://pi19404.github.io/pyVision/2015/04/03/22/
Ceci utilise le module rfcomm, pour vérifier qu'il est bien en fonctionnement:
lsmod | grep rfcomm
Ceci n est plus à jour
création d'un fichier associé à l'adresse mac du module:
sudo nano /etc/bluetooth/rfcomm.conf
- rfcomm.conf
rfcomm0 { bind no; device 00:13:AA:00:2C:AA; channel 1; comment "Serial Port"; }
sudo service bluetooth restart
d'après https://unix.stackexchange.com/questions/128531/rfcomm-device-seems-to-be-missing-dev-rfcomm0 , /etc/bluetooth/rfcomm.conf n'est plus utilisé avec la nouvelle version, il faut faire à la main avec des appels de rfcomm
Ceci est à jour mais ne marche pas pour le Bluetooth BLE
sudo rfcomm connect 0
pour attacher le lien au fichier /dev/rfcomm0
sudo rfcomm bind 0 00:13:AA:00:2C:AA 1
pour détacher le lien au fichier /dev/rfcomm0
sudo rfcomm unbind 0 00:13:AA:00:2C:AA
AIE…. d'après https://raspberrypi.stackexchange.com/questions/71719/raspberry-pi-3-bluetooth-is-not-getting-connected-with-hm-10-bluetooth-module , BLE is different than the classic Bluetooth, so you can't use the rfcomm serial devices to communicate with the HM-10
“ My understanding is the HM-10 only works using Bluetooth 4.0 Low Energy (BLE). BLE is different than the classic Bluetooth, so you can't use the rfcomm serial devices to communicate with the HM-10. Instead you need to use the gatttool to discover the different characteristics of the device and read/write data. 0000ffe1-0000-1000-8000-00805f9b34fb is the characteristic the HM-10 uses by default to read/write up to 20 bytes at a time (ID can be changed using the AT commands).
Alternatively if you are using a recent version of BlueZ (5.46 or newer) then you can use the acquire-write and acquire-notify commands of bluetoothctl to create file descriptors you can use to read and write data. On my Raspberry Pi 3 I had Ubuntu 16.04.3 installed but bluetoothctl -v showed an older version. I came across this script that worked to install a newer version, and after enabling the experimental features in bluetoothd the acquire commands started working.”
Script d'install: https://github.com/muka/go-bluetooth/blob/master/scripts/bluez-install.sh
Commandes pour utiliser le BLE: https://unix.stackexchange.com/questions/392103/using-acquire-write-and-acquire-notify-in-bluetoothctl-for-bluetooth-low-energe
bluetoothctl -v
j'ai la version 5.37
TODO: installer une version plus récente via le script
Module JDY-30
utilisation du module avec DevDuino BT App has been designed with MIT App Inventor : https://www.ebay.fr/itm/JDY-10-HM-11-Bluetooth-4-0-BLE-Serial-Transmission-Module-Comptible-with-CC2541-/173511871746
documentation sur JDY-30 et JDY-31: http://www.ko4bb.com/getsimple/index.php?id=jdy-30jdy-31-bluetooth-modules
http://www.ko4bb.com/getsimple/data/uploads/jdy-30/jdy-30-bluetooth-module.pdf
Bluetooth Mesh
Communication entre PC linux et module HM10 en python
Communication entre PC linux et smartphone android via Bluetooth
Communication entre 2 modules HM10 connectés via FTDI232
Utilisation comme récepteur de télécommande téléphone avec remoteXY
Installation Librairie Arduino sous Linux
mkdir -p ~/Arduino/libraries/RemoteXY cd ~/Arduino/libraries/RemoteXY wget http://remotexy.com/download/library/2.3.5/RemoteXY.zip unzip RemoteXY.zip rm RemoteXY.zip
Programme arduino généré en ligne
programmer le sketch suivant:
- hm10_remoteXY.ino
/* -- New project -- This source code of graphical user interface has been generated automatically by RemoteXY editor. To compile this code using RemoteXY library 2.3.3 or later version download by link http://remotexy.com/en/library/ To connect using RemoteXY mobile app by link http://remotexy.com/en/download/ - for ANDROID 4.1.1 or later version; - for iOS 1.2.1 or later version; This source code is free software; you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation; either version 2.1 of the License, or (at your option) any later version. */ ////////////////////////////////////////////// // RemoteXY include library // ////////////////////////////////////////////// // RemoteXY select connection mode and include library #define REMOTEXY_MODE__SOFTSERIAL #include <SoftwareSerial.h> #include <RemoteXY.h> // RemoteXY connection settings #define REMOTEXY_SERIAL_RX 2 #define REMOTEXY_SERIAL_TX 3 #define REMOTEXY_SERIAL_SPEED 9600 // RemoteXY configurate #pragma pack(push, 1) uint8_t RemoteXY_CONF[] = { 255,2,0,0,0,12,0,8,13,0, 5,0,42,18,30,30,2,26,31 }; // this structure defines all the variables of your control interface struct { // input variable int8_t joystick_1_x; // =-100..100 x-coordinate joystick position int8_t joystick_1_y; // =-100..100 y-coordinate joystick position // other variable uint8_t connect_flag; // =1 if wire connected, else =0 } RemoteXY; #pragma pack(pop) ///////////////////////////////////////////// // END RemoteXY include // ///////////////////////////////////////////// void setup() { RemoteXY_Init (); Serial.begin(9600); // TODO you setup code } void loop() { RemoteXY_Handler (); Serial.print(RemoteXY.joystick_1_x,DEC); Serial.print(" , "); Serial.println(RemoteXY.joystick_1_y,DEC); // TODO you loop code // use the RemoteXY structure for data transfer }
Installer RemoteXY depuis AppStore Android et le lancer cliquer sur + et choisir le périphérique Bluetooth Low Energy : BT05 (si échec de connexion, réessayer)
dans console miniterm, la position du joystick doit s'afficher:
44 , 50